


相机和激光雷达的标定是许多任务中至关重要的基础工作,标定的准确度直接影响了后续方案融合的效果上限。随着许多自动驾驶和机器人公司投入了大量的人力和物力来不断提高标定的准确性,今天我们将为大家介绍一些常见的Camera-Lidar标定工具箱,建议大家收藏起来!
一次拍摄多棋盘格检测:https://www.cvlibs.net/software/libcbdetect/
使用MATLAB编写的算法能够自动提取角点并将它们精确到亚像素级别,并将这些角点组合成矩形棋盘状的图案。该算法具有处理不同类型图像(如针孔相机、鱼眼相机、全景相机)的能力。

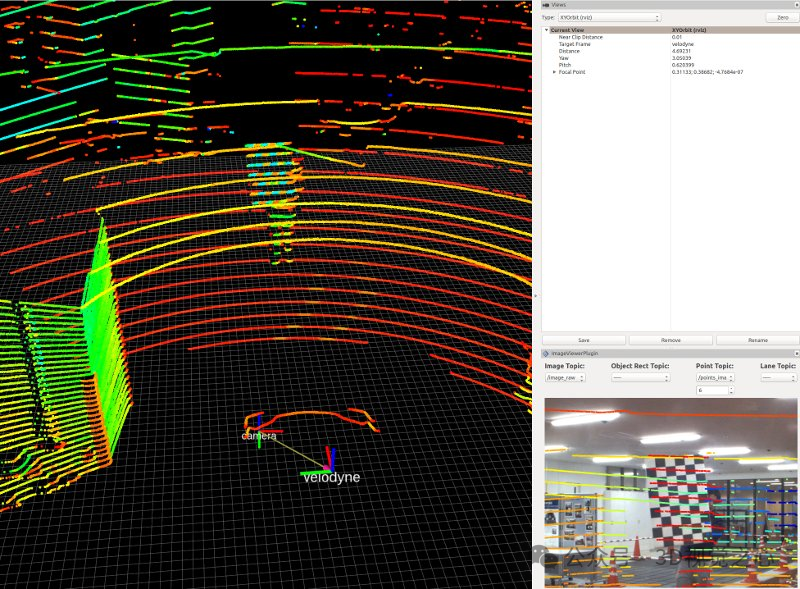
Autoware 框架的激光雷达-相机标定工具包。
链接:https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
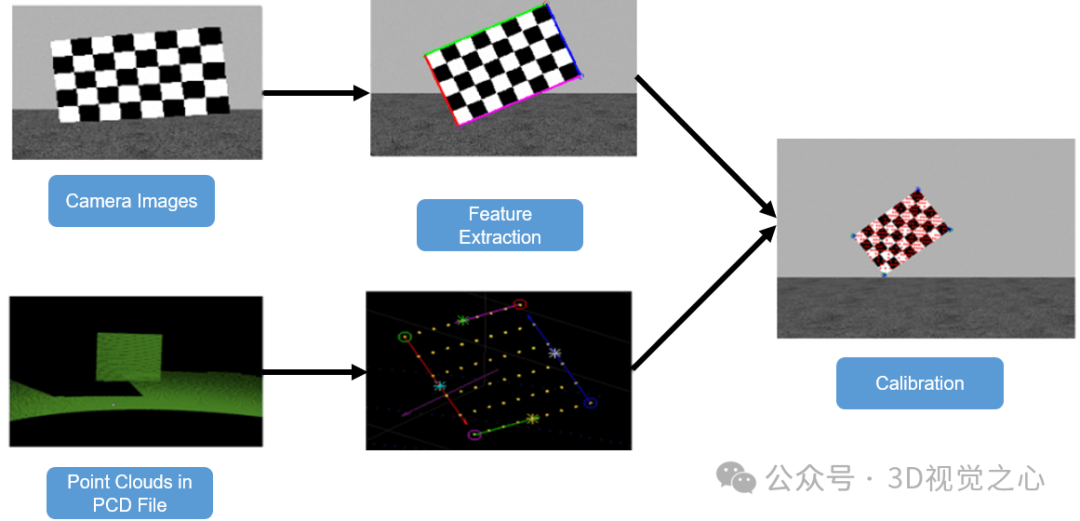
基于3D-3D点对应关系的激光雷达相机标定,ROS包,出自论文《LiDAR-Camera Calibration using 3D-3D Point correspondences》!
链接:https://github.com/ankitdhall/lidar_camera_calibration
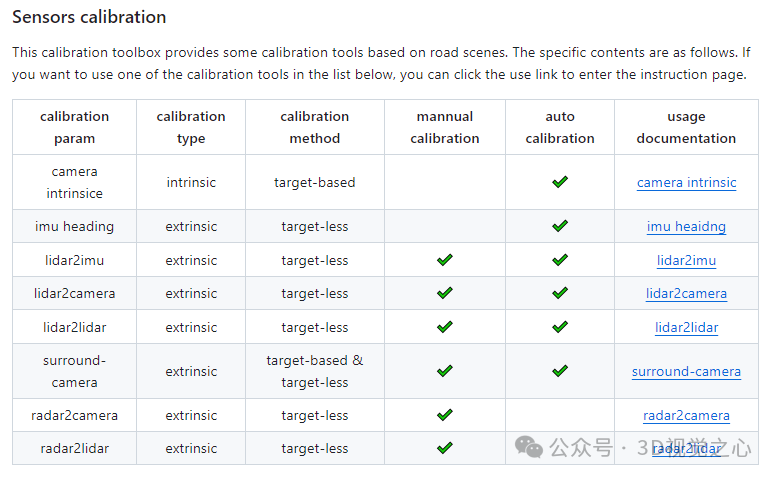
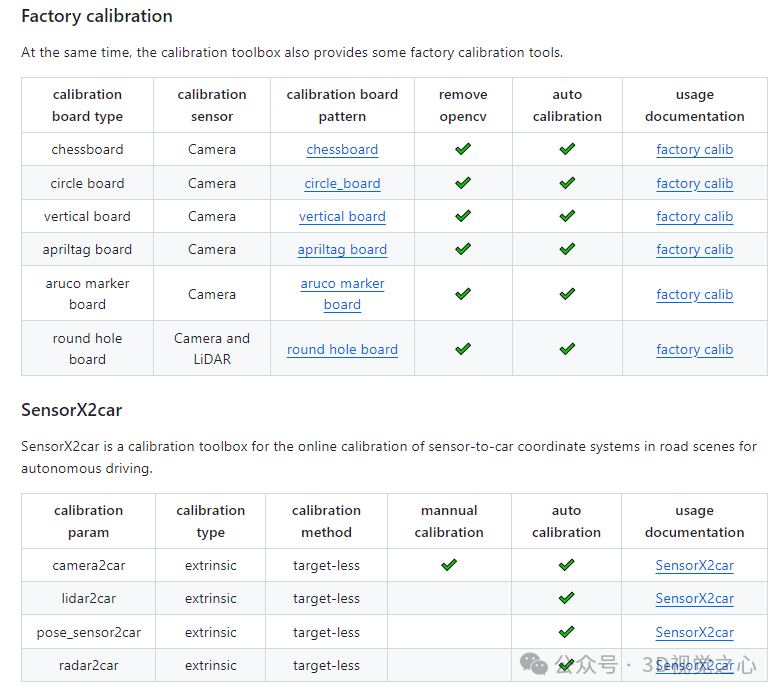
上海人工智能实验室出品,OpenCalib提供了一个传感器标定工具箱。工具箱可用于标定IMU、激光雷达、相机和Radar等传感器。
链接:https://github.com/PJLab-ADG/SensorsCalibration
Apollo标定工具箱,链接:https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
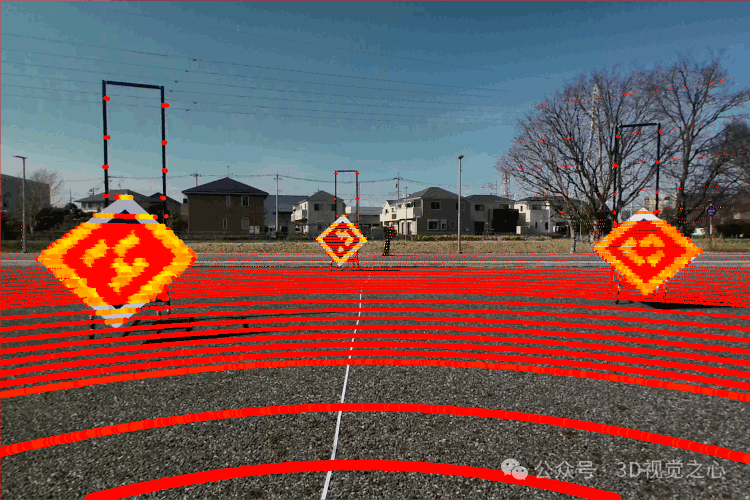
本方案提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
链接:https://github.com/Livox-SDK/livox_camera_lidar_calibration
中文文档:https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md
CalibrationTools为激光雷达-激光雷达、激光雷达相机等传感器对提供标定工具。除此之外,还提供了:
1)定位-偏差估计工具估计用于航位推算(IMU和里程计)的传感器的参数,以获得更好的定位性能!
2)Autoware控制输出的可视化和分析工具;
3)用于修复车辆指令延迟的校准工具;
链接:https://github.com/tier4/CalibrationTools
Matlab自带的工具箱,支持激光雷达和相机的标定,链接:https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
ROS Camera LIDAR Calibration Package,链接:https://github.com/heethesh/lidar_camera_calibration

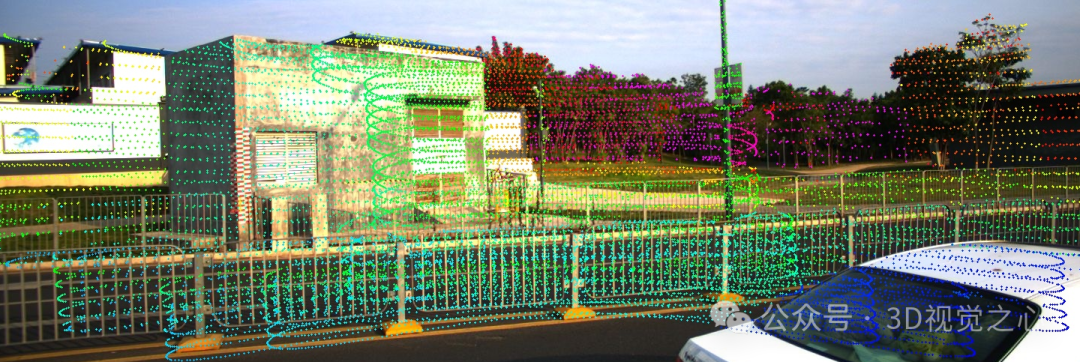
该软件包提供了一个用于激光雷达相机标定的工具箱:可通用:它可以处理各种激光雷达和相机投影模型,包括旋转和非重复扫描激光雷达,以及针孔、鱼眼和全向投影相机。无目标:它不需要标定目标,而是使用环境结构和纹理进行标定。单次拍摄:标定至少只需要一对激光雷达点云和相机图像。可选地,可以使用多个激光雷达相机数据对来提高精度。自动:标定过程是自动的,不需要初始猜测。准确和稳健:它采用了像素级直接激光雷达相机配准算法,与基于边缘的间接激光雷达相机配准相比,该算法更稳健和准确。
链接:https://github.com/koide3/direct_visual_lidar_calibration
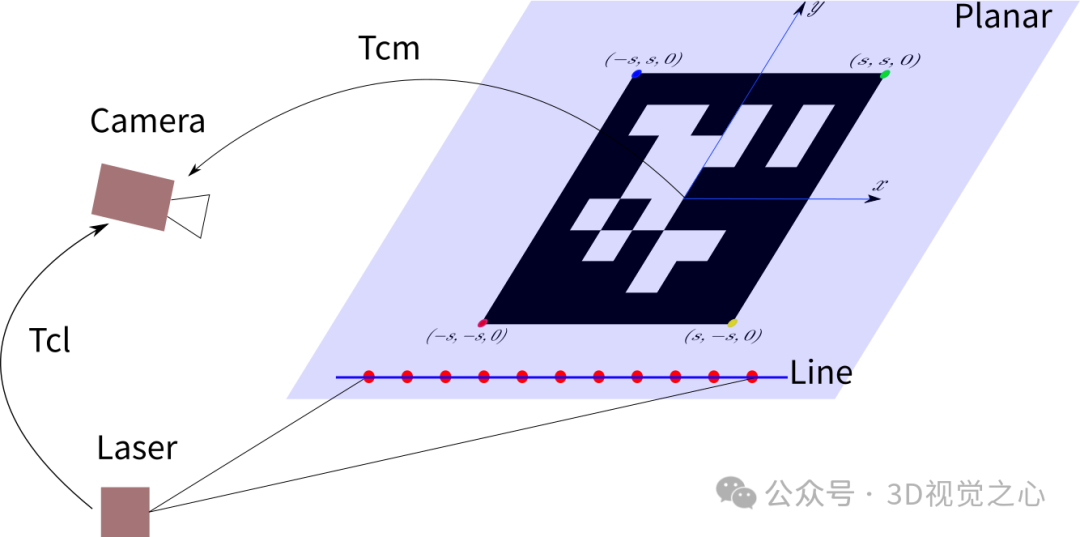
这是一个基于 ROS 的单线激光和相机外参数自动标定代码。标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
链接:https://github.com/MegviiRobot/CamLaserCalibraTool
以上是相机与激光雷达是怎么标定的?一览行业所有主流的标定工具的详细内容。更多信息请关注PHP中文网其他相关文章!
 So verbinden Sie PHP mit der MSSQL-Datenbank
So verbinden Sie PHP mit der MSSQL-Datenbank
 So listen Sie Inscription Coin an der Börse auf
So listen Sie Inscription Coin an der Börse auf
 So legen Sie Top-Text auf WeChat fest
So legen Sie Top-Text auf WeChat fest
 Der Unterschied zwischen Export und Exportstandard
Der Unterschied zwischen Export und Exportstandard
 So legen Sie Startelemente beim Start fest
So legen Sie Startelemente beim Start fest
 Was bedeutet WeChat-Klon?
Was bedeutet WeChat-Klon?
 Welche Software ist Penguin?
Welche Software ist Penguin?
 Die Rolle des Basis-Tags
Die Rolle des Basis-Tags
























