


In der kollaborativen, vernetzten und automatisierten Mobilität (CCAM) gilt: Je stärker die Fähigkeit intelligent fahrender Fahrzeuge, die Umgebung wahrzunehmen, zu modellieren und zu analysieren, desto bewusster und fähiger sind sie. Treffen Sie Entscheidungen und führen Sie komplexe Fahrszenarien sicher und effizient durch. Hochpräzise (HD) Karten stellen Straßenumgebungen mit zentimetergenauer Genauigkeit und semantischen Informationen auf Fahrspurebene dar und machen sie zu einem Kernbestandteil intelligenter Mobilitätssysteme und einem Schlüsselfaktor für die CCAM-Technologie. Diese Karten bieten automatisierten Fahrzeugen einen großen Vorteil beim Verständnis ihrer Umgebung. HD-Karten gelten auch als versteckte oder virtuelle Sensoren, da sie das Wissen physischer Sensoren (Karten), nämlich Lidar, Kameras, GPS und IMU, zusammenführen, um ein Modell der Straßenumgebung zu erstellen. HD-Karten entwickeln sich schnell zu ganzheitlichen Darstellungen der digitalen Infrastruktur von Smart Citys, die nicht nur Straßengeometrie und semantische Informationen, sondern auch Aktualisierungen der Echtzeitwahrnehmung von Straßenteilnehmern, Wetterbedingungen, Arbeitsbereichen und Vorfällen umfassen. Der Einsatz autonomer Fahrzeuge in großem Maßstab erfordert die Erstellung und Wartung dieser Karten durch eine große Fahrzeugflotte, die zusammenarbeiten, um die Karten kontinuierlich zu aktualisieren, damit die autonomen Fahrzeuge in der Flotte ordnungsgemäß funktionieren können. Dieses Papier bietet einen umfassenden Überblick über verschiedene Anwendungen dieser Karten in hochautomatisierten Fahrsystemen (AD). Wir überprüfen systematisch die jüngsten Fortschritte bei verschiedenen Methoden und Algorithmen zur Erstellung und Pflege hochpräziser Karten. Daten-, Kommunikations- und Infrastrukturanforderungen für die HD-Kartenverteilung werden ebenfalls diskutiert und synthetisiert. Abschließend werden aktuelle Herausforderungen besprochen und zukünftige Forschungsrichtungen für digitale Kartierungssysteme der nächsten Generation diskutiert.
Das Aufkommen moderner Satellitensysteme und Bildtechnologie hat die Erstellung genauer und detaillierter digitaler Darstellungen der Welt revolutioniert und das hervorgebracht, was wir heute nennen Digitale Karten wie Google Maps, OpenStreetMap, Apple Maps, Garmin und Mapbox. Digitale Karten kodieren die Straßenstruktur und grundlegende semantische Informationen sowie Points of Interest (POIs). Es gibt verschiedene Methoden und Techniken, um die geografischen Merkmale zu extrahieren und zu identifizieren, die zum Erstellen dieser Karten aus Satellitenbildern erforderlich sind. Digitale Karten sind heute ein unverzichtbares Werkzeug in unserem täglichen Leben, insbesondere wenn sie in GPS integriert sind. Tatsächlich war diese Integration eine Kernkomponente beim Aufbau einer Vielzahl digitaler Dienste, vor allem Navigation und Routing. Diese Karten wurden in erster Linie zur Unterstützung des Menschen entwickelt und sind jetzt in den neuesten Fahrzeugen verfügbar, um menschliche Fahrer zu unterstützen. Diese Karten sind jedoch in ihrer Genauigkeit und Präzision sowie in der für AD erforderlichen Aktualisierungszeit begrenzt, da Fahrzeuge ein gewisses Maß an Standortgenauigkeit sowie detaillierte Informationen auf Spurebene benötigen.
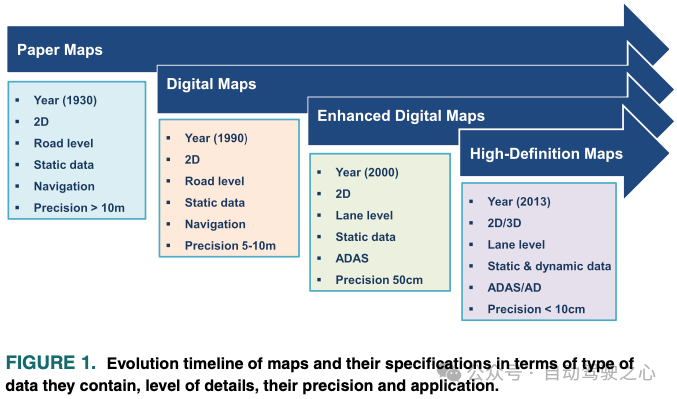
Die digitale Karte wurde erheblich verbessert, um den Anforderungen von Advanced Driver Assistance System (ADAS)-Funktionen wie dem Spurhalteassistenten und der adaptiven Geschwindigkeitsregelung (ACC) gerecht zu werden. Zu den typischen Merkmalen dieser erweiterten digitalen Karten gehören Geschwindigkeitsbegrenzungen, Straßenkrümmungen und -neigungen, Spurinformationen sowie Verkehrszeichen und Ampeln. Erweiterte digitale Karten, auch ADAS-Karten genannt, sind heute ein integraler Bestandteil der meisten modernen Fahrzeuge und ermöglichen die ADAS-Funktionalität. Obwohl verbesserte digitale Karten Informationen auf Fahrspurebene einführen, schränken ihre geometrische Genauigkeit und der semantische Detaillierungsgrad ihre Anwendbarkeit auf höheren Autonomieebenen ein. In AD-Systemen müssen sich Fahrzeuge mit hoher Präzision relativ zu ihrer Umgebung positionieren, die aktuelle Situation verstehen und kollisionsfreie Trajektorien planen. Um dieses Maß an Autonomie zu erreichen, müssen automatisierte Fahrzeuge nicht nur Karten mit zentimetergenauer Positionsgenauigkeit und geometrischen Informationen auf Spurebene erfassen, sondern auch ein 3D-Modell der Umgebung mit allen statischen und dynamischen Eigenschaften der Straßenumgebung.
Es ist notwendig, hochpräzise Karten oder hochpräzise Karten zu generieren, um die oben genannten Anforderungen zu erfüllen. Abbildung 1 veranschaulicht die Entwicklung, Eigenschaften und Verwendungszwecke der Karte sowie die darin enthaltenen Informationen, Genauigkeit und Detaillierungsgrad.
Im Laufe des letzten Jahrzehnts haben sowohl die Wissenschaft als auch die Industrie die Grenzen hochauflösender Karten durch massive Forschungs- und Entwicklungsanstrengungen erweitert . Allerdings gibt es noch einige ungelöste Probleme bei der maßstabsgetreuen Erstellung von HD-Karten, die das volle Potenzial und das ultimative Ziel von HD-Karten bei der Ermöglichung autonomer Mobilität behindern. Diese Herausforderungen können in die folgenden Kategorien unterteilt werden.
Dieses Dokument bietet einen detaillierten Überblick über HD-Karten, einschließlich eines einheitlichen Modells seiner Schichtarchitektur. Gleichzeitig wird die Bedeutung hochpräziser Karten im modularen AD-System hervorgehoben und deren Verwendung in verschiedenen AD-Kernfunktionen synthetisiert. Dieser Artikel bietet einen ausführlichen Überblick über die Herausforderungen bei der Sammlung, Kommunikation, Verarbeitung, Sicherheit und Kosten von Kartendaten, einschließlich kostengünstiger Lösungen und Kommunikations- und Kartendatenanforderungen von der Generierung bis zur Verteilung. Darüber hinaus werden aktuelle Herausforderungen bei der Erstellung und Pflege von HD-Karten besprochen. Abschließend werden einige Inspirationen für zukünftige und mobile Hochpräzisionskarten der nächsten Generation gegeben. Um die Hauptbeiträge zusammenzufassen:
Frühe HD-Karten sind nur eine Erweiterung der in ADAS verwendeten erweiterten digitalen Karten, sie werden als frühe Karten bezeichnet. Der Begriff „HD Maps“ ist erst vor Kurzem aufgetaucht, wird aber inzwischen von der CCAM-Branche, einschließlich Tier-1-Automobilunternehmen, Kartenanbietern und OEMs, weithin akzeptiert. HD-Karten enthalten alle notwendigen Informationen, damit automatisierte Fahrzeuge die Fahrumgebung mit sehr hoher Genauigkeit verstehen können. Obwohl allgemein anerkannt ist, dass HD-Karten die Kernfunktionen von CCAM sind, gibt es keine klaren Richtlinien oder Standards dafür, welche Informationen HD-Karten darstellen und wie diese Informationen dargestellt werden. Dennoch weisen die auf dem Markt erhältlichen HD-Karten gemeinsame Merkmale auf. Die Positionsgenauigkeit auf Zentimeterebene und die Verfügbarkeit geometrischer und semantischer Informationen auf Fahrspurebene sind wesentliche Merkmale der meisten HD-Karten. Auf der einfachsten Ebene kann eine HD-Karte einfach aus einer Reihe von Punkten und Liniensegmenten bestehen, deren genaue Positionen Verkehrszeichen, Fahrbahnmarkierungen, Fahrbahngrenzen und Fahrbahntrennungen darstellen. Aufgrund der Anforderungen von AD-Systemen werden die heutigen hochpräzisen Karten immer komplexer und Daten aus verschiedenen Quellen bilden mehrere Informationsebenen über die Fahrumgebung. Die Aufteilung von HD-Karten in mehrere Ebenen ermöglicht eine strukturiertere Datendarstellung der Straßenumgebung. Dies erleichtert den Zugriff auf verschiedene Komponenten des AD-Systems, die eine Modellierung der Umgebung auf unterschiedlichen Detailebenen erfordern. Darüber hinaus erleichtert die hierarchische Datendarstellung die Erstellung, Speicherung, den Abruf und die Wartung von Karten. Beispiele für diese Schichten sind in Abbildung 2 dargestellt.
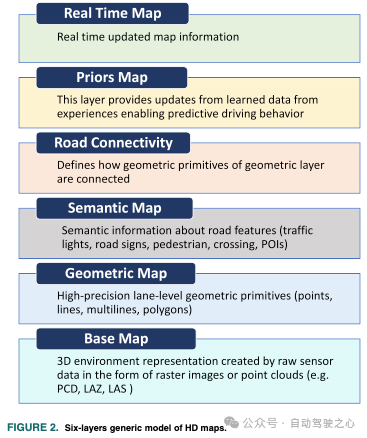
Wie oben erwähnt, gibt es mehrere Möglichkeiten, Karteninformationen darzustellen, die in AD-Systemen verwendet werden, einschließlich Details auf Fahrspurebene wie Fahrspurgrenzen, Fahrspurmarkierungstypen, Verkehrsrichtungen, Zebrastreifen, befahrbare Bereichspolygone und Kreuzungsanmerkungen. Obwohl die Fahrumgebung sehr dynamisch ist, sind die in diesen drei Schichten dargestellten Daten statisch. Die Gesamtdarstellung der Umgebung sollte auch Echtzeit-Verkehrsinformationen zu beobachteten Geschwindigkeiten, Wetterbedingungen, Staubereichen, Straßensperrbereichen (Baustellen) usw. umfassen. In diesem Abschnitt wird versucht, auf einheitliche Weise einen globalen Überblick über die in diesen Schichten gespeicherten Informationen zu geben. Obwohl die meisten HD-Kartenanbieter ihre eigenen Definitionen und Formate haben und es keinen einheitlichen Standard für HD-Karten gibt, unterteilen wir die in HD-Karten enthaltenen Informationen in sechs verschiedene Ebenen, wie in Abbildung 2 dargestellt.
Die Basiskartenebene ist die Grundlage der HD-Karte und gilt als Referenzebene, auf der alle anderen Ebenen aufgebaut sind. Es enthält eine hochpräzise dreidimensionale Geodatendarstellung der Umgebung, beispielsweise der Lage und Form von Straßen, Gebäuden und anderen Strukturen. Dreidimensionale Geodatenmodelle der Straßenumgebung werden zu einer wichtigen Informationsquelle für autonome Fahrzeuge. Heutzutage enthalten HD-Karten häufig dreidimensionale Darstellungen der Umgebung. Basiskartenebenen werden in der Regel mithilfe von Punktwolken aus LIDAR und/oder Bildern von einer oder mehreren Kameras erstellt, manchmal mit Hilfe von GPS/IMU. Diese Sensorsuite bildet ein MMS, das eine äußerst genaue und detaillierte 3D-Punktwolke erstellt, die die Umgebung darstellt. Aus diesem Layer werden geometrische und semantische Merkmale von Straßen und Fahrspuren extrahiert, um weitere Layer in der HD-Karte zu erstellen. Da diese Schicht eine dichte Datendarstellung der Umgebung enthält, spielt sie eine entscheidende Rolle bei der genauen Lokalisierung autonomer Fahrzeuge. Mehrere Techniken zur Punktwolkenregistrierung ermöglichen die Schätzung der Fahrzeugposition, indem rohe Sensordaten mit der Punktwolke dieser Schicht abgeglichen werden. Der Aufbau und die Aktualisierung dieser Schicht stellt hinsichtlich der Datenverarbeitungs- und Kommunikationsanforderungen eine Herausforderung dar.
Obwohl die Basiskartenebene eine präzise und dichte Darstellung der Umgebung bietet, ist ihre Fähigkeit, das Verständnis der Umgebung zu unterstützen, aufgrund des Mangels an aussagekräftigen Merkmalen in ihrer Darstellung begrenzt. Geometrieebenen in HD-Karten liefern detaillierte Informationen über die Geometrie der Straßenumgebung, einschließlich der Lage und Form von Straßen, Fahrspuren, Bordsteinen und anderen Merkmalen. Die Geometrieebene enthält typischerweise Informationen über die Breite der Straße, die Anzahl der Fahrspuren, die Mittellinie jeder Fahrspur, die Grenzen der Fahrspuren in jeder Straße und die Höhe der Straßenoberfläche. Es enthält auch Informationen über die genaue Lage und Form von Bordsteinen, Gehwegen, Zebrastreifen sowie vertikalen und horizontalen Verkehrszeichen. Jedes dieser Merkmale wird durch grundlegende geometrische Grundelemente dargestellt, nämlich Punkte, Linien, Polylinien und Polygone. Beispielsweise kann die Position eines vertikalen Verkehrszeichens durch einen Punkt dargestellt werden. Die Mittellinie oder Grenze einer Fahrspur kann durch eine Reihe miteinander verbundener Liniensegmente dargestellt werden, beispielsweise durch eine Polylinie. Ebenso kann ein Zebrastreifen durch ein Polygon dargestellt werden. Die geometrischen Merkmale dieser Ebene werden durch die Verarbeitung der Daten aus der Basiskartenebene erstellt. Der Aufbau einer Geometrieebene aus Basiskartendaten umfasst in der Regel mehrere Verarbeitungsschritte, einschließlich Straßensegmentierung, Extraktion von Spurinformationen, Verkehrsschildern, Masten, Verkehrsschildern, Bordsteinen, Hindernissen und Fahrbahnmerkmalen. Dieser Layer bietet eine äußerst genaue geometrische Darstellung von Straßenmerkmalen auf Fahrspurebene. Geometrische Merkmale in HD-Karten sind für verschiedene AD-Kernkomponenten von entscheidender Bedeutung, vor allem für die genaue Bewegungsvorhersage dynamischer Straßenteilnehmer und die sichere Planung geometrisch realisierbarer Trajektorien.
Die semantische Kartenebene definiert die Bedeutung der Straßenmerkmale, die von der Geometriekartenebene bereitgestellt werden. Die Daten in dieser Ebene liefern Kontext und Bedeutung für die in der Karte dargestellten Features. Beispielsweise enthält eine semantische Kartenebene in einer HD-Karte Informationen wie Straßentyp (z. B. Autobahn, Anliegerstraße) und Fahrspuren (können sich z. B. nach links oder rechts ändern), deren Nummern, Verkehrsrichtung und ob die Fahrspur vorhanden ist Wird zum Abbiegen oder zum Abbiegen verwendet. Informationen zum Parken. Es enthält außerdem Informationen zu Geschwindigkeitsbegrenzungen, Fahrspurgrenzen, Kreuzungen, Zebrastreifen, Verkehrsschildern, Ampeln, Parkplätzen, Bushaltestellen und vielen anderen Merkmalen, die für die Erstellung kontextbezogener Darstellungen der Umgebung wichtig sind. Die semantische Kartenebene ermöglicht es autonomen Fahrzeugen, detaillierte Situationsdarstellungen ihrer Umgebung zu erstellen und Verkehrsregeln zu verstehen, sodass sie in verschiedenen Verkehrsszenarien richtige und sichere Entscheidungen treffen können. Einfach ausgedrückt weist die semantische Kartenebene den in der geometrischen Karte definierten Straßenmerkmalen und Objekten semantische Beschriftungen zu. Beispielsweise ist ein Punkt in einer Geometrieebene nichts anderes als ein geordneter Satz von Koordinaten in einem Kartenkoordinatenreferenzsystem. Nur die semantische Ebene definiert, ob der Punkt einer Ampel, einem Vorfahrtsschild oder einem Stoppschild entspricht. Wie wir alle wissen, enthalten hochpräzise Karten umfangreiche semantische Informationen. Die semantische Ebene verknüpft auch Metadaten mit Straßenmerkmalen wie Straßenkrümmung, empfohlener Fahrgeschwindigkeit und eindeutigen Kennungen für jedes semantische Merkmal. Tatsächlich ermöglichen semantisch reichhaltige HD-Karten selbstfahrenden Autos, die Fahrsituation besser zu verstehen und komplexe Entscheidungen in komplexen Szenarien zu treffen. Allerdings ist die Erstellung zuverlässiger und hochpräziser semantischer Diagramme der Straßenumgebung kein einfacher Prozess. Es sind mehrere Verarbeitungsschritte erforderlich, die nicht auf Szenensegmentierung, Objekterkennung, Klassifizierung, Posenschätzung und Kartierung beschränkt sind. Mit den jüngsten Fortschritten in den Bereichen Computer Vision, Deep Learning, Sensorfusion und semantischen SLAM-Algorithmen ist es möglich geworden, genaue semantische Diagramme zu erstellen.
Die Straßenverbindungsschicht beschreibt die Topologie des Straßennetzes und wie verschiedene geometrische Elemente verbunden sind. Im Gegensatz zur Standarddefinition einer digitalen Karte, die nur Informationen auf Straßenebene und Verbindungen auf Straßenebene enthält, enthalten HD-Karten geometrische und semantische Informationen auf Fahrspurebene, sodass die Verbindungen zwischen Straßen komplex werden, da sie zwei oder mehr Fahrspursätze definieren . Verbindungen zwischen. Genauer gesagt stellt diese Ebene das Layout und die Konnektivität der Straße bereit, einschließlich Fahrspurgrenzen, Mittellinien und Kreuzungen. Konnektivitätsinformationen auf Fahrspurebene sind für die Planung legaler Übergänge zwischen Straßen und Fahrspuren sowie für die Planung zulässiger Operationen an jeder Kreuzung erforderlich, was für die Pfadplanung für autonome Fahrzeuge von entscheidender Bedeutung ist. Einfach ausgedrückt definiert diese Ebene, wie die Grundelemente, aus denen die Geometrieebene besteht, miteinander verbunden sind. Diese Verbindungen werden durch die Definition aufeinanderfolgender Paare geometrischer und semantischer Elemente hergestellt. Die Zuweisung einer eindeutigen Kennung zu jedem geometrischen und semantischen Element ermöglicht die Darstellung dieser Informationen mithilfe von Diagrammdatenstrukturen, bei denen jedes Element durch eine Kante und ihre Verbindungen als Knoten dargestellt wird. Die grafische Struktur ermöglicht eine schnelle Abfrage und Suche von Karten sowie eine effiziente Routenplanung.
Diese Ebene wird auch als vorherige Kartenebene bezeichnet, da sie Informationen aus vergangenen Erfahrungen darstellt und daraus lernt. Dabei handelt es sich um geometrische und semantische Elemente in der Karte, deren Zustand sich im Laufe der Zeit ändert. Das Erlernen von Verkehrsströmen und dem Status von Unfallgebieten aus Flottendaten ermöglicht ein effizienteres und vorausschauendes Fahrverhalten. Diese Schicht erfasst und lernt auch Informationen, die dabei helfen, das menschliche Fahrverhalten und den dynamischen Zustand von Ampeln an Kreuzungen vorherzusagen. Es passt sich auch an temporäre Straßeneinstellungen wie Parkordnung, Belegung und Fahrpläne an. Beispielsweise ändert sich das Parken auf der Straße in einigen Städten an bestimmten Wochentagen, die Wahrscheinlichkeit der Belegung wird vorhergesagt und die Zeitregeln für einen bestimmten Parkplatz werden aus früheren Kartenschicht-Sensormessungen verschiedener Flottenfahrzeuge abgeleitet, die diesen Parkplatz passieren . Das Erlernen und Vorhersagen des Fahrverhaltens von Straßenfahrern kann aufgrund soziokultureller Unterschiede zwischen verschiedenen Gesellschaften eine Herausforderung sein. Die empirische Modellierung dieser Verhaltensweisen ist für ein allgemeines und skalierbares AD-System von entscheidender Bedeutung.
Die Echtzeitebene in HD-Karten ist eine dynamische Ebene, die Echtzeitinformationen über die Umgebung bereitstellt, z. B. Verkehrsbedingungen, Straßensperrungen und andere Ereignisse, die sich auf autonome Fahrzeuge auswirken können Navigation. Diese Schicht wird typischerweise durch die Kombination von Daten aus verschiedenen Quellen erstellt, wie z. B. Kameras, Sensoren und anderen angeschlossenen Geräten, die in Fahrzeugen montiert sind oder sich am Straßenrand befinden. Durch Crowdsourcing der teilnehmenden Fahrzeuge oder intelligenter Infrastruktur mithilfe spezifischer Kommunikationsnetzwerke werden Daten in Echtzeit gesammelt und zur Aktualisierung hochpräziser Karten verwendet. Die Echtzeitschicht kann Informationen wie den Standort und die Geschwindigkeit anderer Fahrzeuge, den Standort und den Status von Verkehrssignalen sowie das Vorhandensein von Baustellen oder anderen Hindernissen und Blockaden auf der Straße umfassen. Diese Informationen sind für autonome Fahrzeuge von entscheidender Bedeutung, um in Echtzeit sichere und effiziente Fahrentscheidungen zu treffen, den Verkehrsfluss zu optimieren und Staus zu reduzieren. Darüber hinaus kann die Echtzeitebene verwendet werden, um die Genauigkeit und Vollständigkeit von HD-Karten zu verbessern, indem aktuelle Informationen über die Umgebung bereitgestellt werden, die von den zur Erstellung der Karte verwendeten Sensoren möglicherweise nicht erfasst wurden. Einfach ausgedrückt bietet die Echtzeitebene in HD-Karten eine dynamische, aktuelle Darstellung der Umgebung. Die Aktualisierung von HD-Karten mit dynamischen Elementen in Echtzeit ist eine Herausforderung und erfordert eine komplexe intelligente Kommunikationsinfrastruktur und die Zusammenarbeit mehrerer Akteure. Die Datenübertragung zwischen intelligenten Transportsystemen (ITS), HD-Kartenanbietern und Fahrzeugen muss zuverlässig sein und bestimmte Anforderungen erfüllen, die später in dieser Umfrage beschrieben werden.
Die hochpräzise Karte liefert dem AD-System eine detaillierte und genaue Darstellung der Straßenumgebung. Diese Karten enthalten geometrische, topologische und semantische Informationen auf Fahrspurebene, die für eine sichere und effiziente Navigation autonomer Fahrzeuge erforderlich sind. Der Einsatz von HD-Karten in selbstfahrenden Autos ermöglicht es ihnen, ihre Umgebung besser zu verstehen, Routen zu planen und genauere Fahrentscheidungen zu treffen, um die Sicherheit von Passagieren und anderen Verkehrsteilnehmern zu gewährleisten. In diesem Abschnitt werden die Bedeutung und Verwendung hochpräziser Karten in AD-Systemen erläutert. Hochpräzise Kartendaten sind mittlerweile ein integraler Bestandteil der meisten verschiedenen Kernkomponenten in AD-Systemen. Um die Bedeutung und Verwendung von HD-Karten in AD zu diskutieren, stellen wir kurz die Architektur und Standardkomponenten eines typischen modernen AD-Systems vor. Abbildung 5 zeigt die Standardkomponenten eines AD-Systems und zeigt diejenigen Komponenten, die auf HD-Karten basieren. Dieser Abschnitt beginnt mit einer kurzen Einführung in die Architektur des AD-Systems, seine Funktionsweise und seine verschiedenen Komponenten. Der Rest dieses Abschnitts bietet einen ausführlichen Überblick über den Stand der Technik bei AD-Komponenten, die auf HD-Karten basieren.
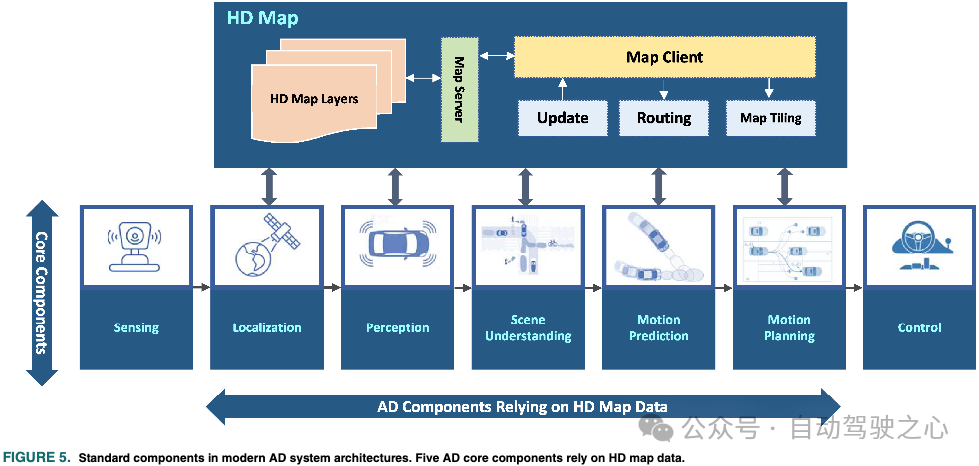
Ein automatisiertes Fahrzeug ist ein komplexes cyber-physisches System, in dem verschiedene Komponenten zusammenarbeiten müssen, um die gesamte Fahraufgabe robust, zuverlässig und sicher zu erledigen. Obwohl es keine eindeutige Architektur für AD-Systeme gibt, stützen wir uns in dieser Arbeit auf eine gemeinsame Architektur, die uns hilft zu verstehen, wie HD-Karten zur Verbesserung verschiedener Funktionen von AD-Systemen verwendet werden können. Ähnlich wie jedes Robotersystem kann ein autonomes Fahrzeug als kognitiver Agent mit drei Hauptkomponenten betrachtet werden: (1) Sensoren, (2) Wahrnehmung und (3) Verhalten. Zerlegt man diese Elemente in ein branchenübliches AD-System, ergeben sich mehrere Komponenten, wie in Abbildung 5 dargestellt. Zu den Sensorkomponenten in modernen AD-Systemarchitekturen gehören normalerweise verschiedene Sensoren wie IMU, GPS, Kameras, Lidar und Radar. Ein Teil dieser Sensoren ermöglicht es dem Fahrzeug, seine Position relativ zur Umgebung zu kennen, also zur Lokalisierung, und die übrigen Sensoren dienen der Erfassung der Umgebung selbst. Die Rolle der Sensorkomponente besteht darin, Rohdaten des Sensors zu lesen, vorzuverarbeiten und sie anderen Teilen des AD-Systems zur Verfügung zu stellen. In ihrer einfachsten Form besteht eine Sensorkomponente aus einer Reihe von Sensortreibern, die rohe Sensordaten in Echtzeit lesen. Die Positionierungskomponente ist eine der kritischsten Komponenten für den zuverlässigen Betrieb des gesamten AD-Systems. Sein Zweck besteht darin, die Position des Fahrzeugs genau abzuschätzen. Lokalisierte Fehler werden an den Rest der AD-Verarbeitungspipeline weitergegeben. Bei der Lokalisierung handelt es sich einfach um einen Zustandsschätzer, der rohe Sensordaten von Sensorkomponenten zusammenführt. Darüber hinaus ermöglicht die Verfügbarkeit von Karten eine verbesserte und robuste Lokalisierung, insbesondere in Gebieten, in denen einige Sensoren ausgefallen sind oder ihre Leistung beeinträchtigt hat. Die Rolle der Wahrnehmung besteht darin, eine Darstellung des aktuellen Zustands der Umgebung auf mittlerer Ebene zu erzeugen, einschließlich Informationen über Hindernisse und Straßenfaktoren. Diese Darstellung umfasst auch Details zu Fahrspuren (Standort, Grenzen, Markierungen und Typen), Verkehrszeichen, Ampeln und befahrbaren Bereichen. Computer-Vision- und Deep-Learning-Techniken werden häufig für Segmentierungs-, Clustering- und Klassifizierungsaufgaben eingesetzt. Darüber hinaus ist auch die Fusion auf Zielebene ein wichtiger Bestandteil dieser Komponente. Das Ergebnis der Wahrnehmung ist eine Liste der verfolgten Objekte und eine semantische Segmentierung des Bildes zum Verständnis der Szene. Auch geometrische und semantische Informationen aus HD-Karten können zur Verbesserung der Objekterkennung und -fusion genutzt werden. Eine genaue Wahrnehmung ist für die Sicherheit von entscheidender Bedeutung, da Wahrnehmungsfehler die Qualität der vom gesamten AD-System verwendeten Informationen beeinträchtigen können. Daher erhöht die Verwendung redundanter Sensordatenquellen das Vertrauen in die Genauigkeit der Wahrnehmung und verbessert dadurch die Robustheit des Gesamtsystems. Die Szenenverständniskomponente ist die Brücke zwischen der Wahrnehmungskomponente im AD-System und der abstrakten Zustandsdarstellung der Umgebung auf mittlerer Ebene, die durch die kognitive Komponente auf hoher Ebene gegeben wird. Ziel dieser Komponente ist es, durch die Erstellung hochpräziser Karten und Daten, die von der Wahrnehmungskomponente bereitgestellt werden, ein höheres Maß an kontextbezogenem Verständnis von Fahrszenarien zu ermöglichen. Später in diesem Abschnitt diskutieren wir, wie diese beiden Informationsquellen zusammengeführt werden können, um eine Szenendarstellung zum Verständnis der Fahrumgebung zu erstellen. Eine weitere Komponente in der AD-Pipeline, die auf HD-Karten basiert, ist die Bewegungsvorhersagekomponente. Es baut auf räumlich-zeitlichen Darstellungen der Umgebung auf hoher Ebene auf, die durch Szenenverständnis bereitgestellt werden, um das Verhalten von Verkehrsteilnehmern rund um das Fahrzeug vorherzusagen. Die Rolle von HD-Karten bei der Bewegungsvorhersage besteht darin, die vorherigen Flugbahnen jedes Verkehrsteilnehmers in der Szene bereitzustellen. Die Bewegungsvorhersage ist ein hochgradig multimodales Problem, bei dem HD-Karten eine Schlüsselrolle spielen und das in diesem Abschnitt ausführlich erörtert wird. Die Bewegungsplanungskomponente soll realisierbare, kollisionsfreie und sichere Trajektorien für autonome Fahrzeuge berechnen. Dies wird durch die Optimierung des globalen kürzesten Pfads erreicht, der durch den Routing-Algorithmus ermittelt wird, der auf den HD-Kartendaten und der vorhergesagten Flugbahn des Straßenagenten läuft. Die Bewegungsplanung umfasst auch Verhaltensplanungsfunktionen, die auf dem Zustand der aktuellen Szene basieren, der durch erkannte Objekte und HD-Karten definiert wird. Das Steuergerät empfängt die geplante Trajektorie und berechnet Steuerbefehle für die Lenk-, Brems- und Beschleunigungsantriebssysteme. Die Steuerungskomponente basiert nicht explizit auf Kartendaten und wird daher in dieser Untersuchung nicht berücksichtigt. Schließlich wird, wie in Abbildung 5 dargestellt, eine spezielle Komponente verwendet, um alle anderen Komponenten zu bedienen, indem sie Anfragen zur Bereitstellung von Kartendaten bearbeitet. HD-Kartendaten werden normalerweise in einer Datenbank gespeichert, die von einem Kartenserver (lokal oder in der Cloud) abgefragt wird, um Anfragen von Kartenclients im Fahrzeug weiterzuleiten, zu kacheln und zu aktualisieren. Da das Routing-Element eine spezielle algorithmische Verarbeitung erfordert, werden wir es bei der Untersuchung von HD-Kartenanwendungen in AD-Systemen berücksichtigen.
Die Positionierungskomponente im AD-System dient dazu, die Position und Ausrichtung des Fahrzeugs relativ zum globalen Referenzkoordinatensystem abzuschätzen. Seine Schlüsselaufgabe besteht darin, eine hohe Genauigkeit und Robustheit bei den erforderlichen Schätzungen aufeinanderfolgender Komponenten im System konstant aufrechtzuerhalten. Die Genauigkeit des Positionierungsalgorithmus bestimmt die Zuverlässigkeit des gesamten AD-Systems. Die Robustheit der Positionierung unter widrigen Wetterbedingungen ist eine Schlüsselanforderung an moderne AD-Systeme, da eine verminderte Schätzleistung schwerwiegende Folgen und potenzielle Schäden haben kann. In den letzten zwei Jahrzehnten hat die umfassende Positionierungsforschung bemerkenswerte Ergebnisse erzielt, die zu einer Vielzahl von Methoden geführt haben. Um normale Betriebsbedingungen zu gewährleisten und eine globale Systemsicherheit zu erreichen, müssen autonome Fahrzeuge innerhalb von 10 Zentimetern positioniert werden.
Die Wahrnehmungskomponente in AD-Systemen ist häufig mit der Verarbeitung von Rohkamerabildern und LIDAR-Punktwolken verbunden, nicht nur zur Erkennung und Verfolgung statischer Objekte (z. B. Verkehrsschilder und Straßenmarkierungen); wie umliegende Fahrzeuge, Fußgänger und Radfahrer. Die Wahrnehmung ist eine der zentralen Kernfunktionen von AD-Systemen. Die Gewährleistung seiner Zuverlässigkeit und Echtzeitleistung ist für die Gewährleistung einer kollisionsfreien Navigation von entscheidender Bedeutung. Die Fusion von Wahrnehmungsdaten mit den detaillierten und präzisen geometrischen und semantischen Informationen, die in den Schichten von HD-Karten enthalten sind, kann möglicherweise die Wahrnehmung verbessern, indem sie sich auf die relevantesten Regionen von Interesse (ROI) konzentriert. Genauer gesagt ermöglicht die Geometrie der HD-Karte die Definition von ROIs zum Filtern der Punktwolke, sodass nur diejenigen übrig bleiben, die für die Wahrnehmungsfunktion von besonderem Interesse sind, wodurch die Recheneffizienz der langsamen Erkennung vereinfacht und erhöht wird.
Das Verständnis der Fahrumgebung ist für autonome Fahrzeuge von entscheidender Bedeutung, um richtige und sichere Entscheidungen zu treffen. Einer der frühen Beweggründe für HD-Karten bestand darin, autonomen Fahrzeugen präzise und detaillierte Informationen zu liefern, um das Verständnis ihrer Umgebung zu erleichtern. Diese Informationen ermöglichen es dem AD-System, die aktuelle Fahrsituation zu verstehen und alle Elemente, aus denen sich die Szene zusammensetzt, zu interpretieren. Die in der Karte enthaltene Geometrie und Semantik ermöglichen den systematischen Aufbau kompakter Datenmodelle und Umgebungsdarstellungen, sodass Fahrzeuge komplexe Fahrszenarien bewältigen können. Genauer gesagt kann die Szenenverständniskomponente in AD-Systemen, unterstützt durch die geometrischen und semantischen Informationen von HD-Karten, konsistent einen aussagekräftigen Wahrnehmungskontext bereitstellen. Neben der Rohobjekterkennung zielt das Szenenverständnis darauf ab, sicherheitskritische Informationen zu extrahieren, abzuschätzen und für nachfolgende Verarbeitungsschritte verfügbar zu machen.
Digitale Karten auf Straßenebene unterstützen die Navigation des menschlichen Fahrers. Routenberechnungen in diesen Karten können nicht über die Verwendung von Verbindungen auf Straßenebene hinausgehen, da diese Karten keine Details auf Fahrspurebene enthalten. Präzise und optimierte Fahrrouten sind notwendig, um Zeit und Energie zu sparen und die Fahrzeugsicherheit weltweit zu erhöhen. Effiziente und kostengünstige Routenberechnungen müssen Fahrspurmodelle der Umgebung berücksichtigen. Darüber hinaus sind in hochdynamischen Umgebungen detaillierte Informationen über den Verkehrsstatus und die Spurbelegung von entscheidender Bedeutung, um Routen dynamisch anzupassen, während autonome Fahrzeuge durch die Umgebung navigieren. Unter Berücksichtigung der detaillierten und genauen Informationen auf Spurebene sowie der A-priori- und Echtzeitebenen der statischen HD-Kartenebene ist eine effiziente dynamische Routenberechnung möglich. Damit das Routing-Subsystem in einem autonomen Fahrzeug einen fahrbaren Weg vom aktuellen Standort zu einem festgelegten Ziel berechnen kann, muss dem System die neueste Karte vom HD-Kartenserver zur Verfügung gestellt werden, wie in Abbildung 5 dargestellt. Alternativ können Routenberechnungen ebenso wie digitale Karten als Service bereitgestellt werden. Nachdem die genaue Position an den HD-Kartenserver gesendet wurde, kann die optimale Route berechnet und an das Fahrzeug zurückgemeldet werden, um andere Kernkomponenten des Systems zu unterstützen. In den letzten Jahren wurden bei diesen Routing-Diensten Echtzeit-Verkehrsbedingungen und Energiefaktoren (z. B. die energieeffizienteste Route) berücksichtigt. Bei autonomen Fahrzeugen können andere Faktoren berücksichtigt werden, beispielsweise Routen, die komplexe städtische Umgebungen meiden, die mit ADS schwer zu navigieren sind, oder Routen mit guter Netzabdeckung, um eine kontinuierliche Konnektivität zu Online-Diensten, einschließlich hochpräziser Echtzeit-Kartendienste, zu gewährleisten.
Die Aufgabe der Bewegungsplanung im AD-System besteht darin, realisierbare, sichere, kollisionsfreie und energiesparende Trajektorien zu generieren. Zu den Aufgaben der Bewegungsplanung gehören typischerweise die Trajektoriengenerierung und die Verhaltensplanung. Bei der Verhaltensplanung handelt es sich um eine erweiterte Entscheidungsfunktion, die dazu dient, Übergänge zwischen verschiedenen Fahrzuständen zu entscheiden, z. B. Spurwechsel, Verfolgung von Fahrzeugen auf der Spur, Verlangsamen und Parken usw. Um diese Transformationen sicher durchzuführen, benötigt der Verhaltensplaner lokale Karten und Fahrzeugbewusstsein, um ein Transformationsmodell der Fahrzeugumgebung zu erstellen. Anders als bei der Navigation in mobilen Robotern ist die Straßenumgebung stark strukturiert und alle Verkehrsteilnehmer müssen sich an die Verkehrsregeln halten. Die generierten AD-Trajektorien sind unbedingt erforderlich, um die Einhaltung der Verkehrsregeln und die Bewegung innerhalb befahrbarer Straßenbereiche sicherzustellen. Für die Bewegungsplanung autonomer Fahrzeuge gibt es unterschiedliche Methoden, die alle in gewissem Maße auf geometrische und semantische Informationen basieren, die von hochpräzisen Karten bereitgestellt werden, um die Verkehrsregeln einzuhalten. Bei probenbasierten Bewegungsplanungsmethoden wird die Fahrspurgeometrie der HD-Karte verwendet, um den Suchraum einzuschränken, indem undurchführbare Kandidatentrajektorien abgelehnt werden.
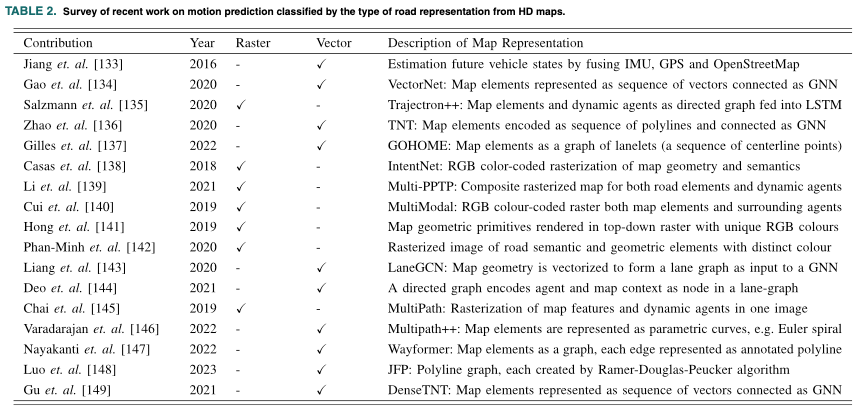
Die Fahrumgebung ist sehr dynamisch und umfasst verschiedene Verkehrsteilnehmer wie Fußgänger, Fahrzeuge und Radfahrer. Die Vorhersage zukünftiger Bewegungen und Verhaltensweisen dieser Verkehrsteilnehmer ist für autonome Fahrzeuge von entscheidender Bedeutung, um kontextbezogene Darstellungen ihrer interaktiven Umgebungen zu erstellen und so potenziell gefährliche Situationen vorherzusagen. Aus einer abstrakten Perspektive können diese Verkehrsteilnehmer als komplexes Multi-Agenten-System betrachtet werden. Tatsächlich wird die Entwicklung zuverlässiger Lösungen zur Vorhersage der Bewegung und des Verhaltens von Verkehrsteilnehmern die Sicherheit und Fähigkeit autonomer Fahrzeuge verbessern, sich an menschenähnliches Verhalten unter realen Verkehrsbedingungen anzupassen. Die Vorhersage des Verhaltens dieser Verkehrsteilnehmer ist für AD-Systeme von entscheidender Bedeutung und wird hauptsächlich zur Risikobewertung und sicheren und komfortablen Bewegungsplanung verwendet. Unter Bewegungsvorhersage versteht man die Abschätzung des zukünftigen Verhaltens von Verkehrsteilnehmern auf der Grundlage ihres aktuellen Zustands und eines Modells ihrer Umgebung. Verschiedene Forschungsanstrengungen haben sich mit dem Problem befasst, zukünftige Bewegungen von Verkehrsteilnehmern vorherzusagen.
HD-Karten können genaue und zuverlässige GT-Daten liefern, die als Referenz für die Kalibrierung der Sensorausgabe verwendet werden können. Beispielsweise kann Lidar mithilfe hochpräziser Koordinaten geometrischer Elemente einer hochauflösenden Karte kalibriert und perfekt mit einer IMU ausgerichtet werden. Durch den Vergleich von Sensormessungen mit HD-Kartendaten können etwaige Fehler oder Unstimmigkeiten identifiziert und korrigiert werden, wodurch die Sensorkalibrierung verbessert wird. Darüber hinaus können HD-Karten zur Online-(Selbst-)Kalibrierung verwendet werden. Die Verfügbarkeit von HD-Karten, Echtzeit-Sensorrohdaten und Algorithmen zur Durchführung von Vergleichen ermöglicht die Berechnung des Fehlers zwischen Sensormessungen und GT. Dadurch ist eine kontinuierliche Korrektur von Sensorkalibrierungsfehlern in Echtzeit möglich. Dies macht das AD-System robuster und zuverlässiger gegenüber sich ändernden Umgebungsbedingungen sowie Änderungen der Sensorleistung. Die Online-Kalibrierung ermöglicht eine genauere und robustere Sensorkalibrierung im Vergleich zu Offline-Kalibrierungsmethoden. In jüngerer Zeit werden HD-Karten auch zur Verbesserung von Straßenanmerkungen verwendet, um große Datensätze für die Erkennung von Verkehrsmarkierungen zu erstellen.
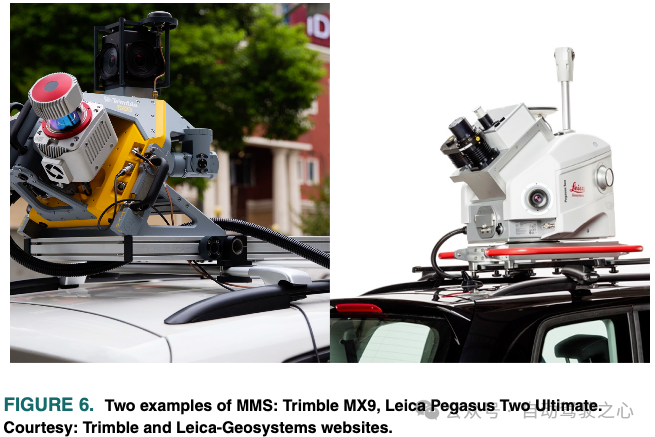
Die Erstellung hochpräziser Karten ist ein komplexer Prozess, der mehrere Schritte erfordert. Der erste Schritt beim Aufbau eines HD-Kartierungsprogramms besteht darin, Spezialfahrzeuge auszusenden, die mit einer Reihe hochpräziser und gut kalibrierter Sensoren ausgestattet sind, um Daten über die Umgebung zu erfassen und zu sammeln. Datenerfassungsfahrzeuge, die für die Kartierung verwendet werden, können mit einer Verbindung zu einem Korrekturdienst mit RTK-Positionierungsgenauigkeit (Echtzeitkinematik) von bis zu einigen Zentimetern oder einem hochpräzisen GNSS ausgestattet sein, der Korrekturdienste ermöglicht. GNSS-Positionierungsmessungen werden häufig mit Messungen von Hochleistungs-IMUs (Inertial Measurement Units) und Radkilometerzählern integriert. Es gibt mehrere kommerzielle Produkte, die GNSS und IMU als Trägheitsnavigationssystem in einer Einheit integrieren. Kartierungsfahrzeuge sind außerdem mit einem oder mehreren hochauflösenden Lidar-Geräten und Kameras ausgestattet, um 3D-/2D-Rohdaten der Straßenumgebung zu erfassen. Es gibt zwei Möglichkeiten, ein Datenerfassungstool für die Kartierung einzurichten. Der erste Schritt besteht darin, die oben genannten Sensoren zu kaufen, die entsprechende Konfiguration auszuwählen und sie im Fahrzeug zu installieren. Obwohl dieser Ansatz die Flexibilität vordefinierter Sensorkonfigurationen bietet, ist die Kalibrierung mehrerer verschiedener Sensoren auf die für die Darstellung erforderliche Genauigkeit nicht trivial und zeitaufwändig, insbesondere bei Kameras. Alternativ bieten einige Hersteller einen ganzen Satz Sensoren in einem einzigen Paket an, das als Mobile Mapping System (MMS) bezeichnet wird. Ein Beispiel für eine kommerzielle MMS ist in Abbildung 6 dargestellt.
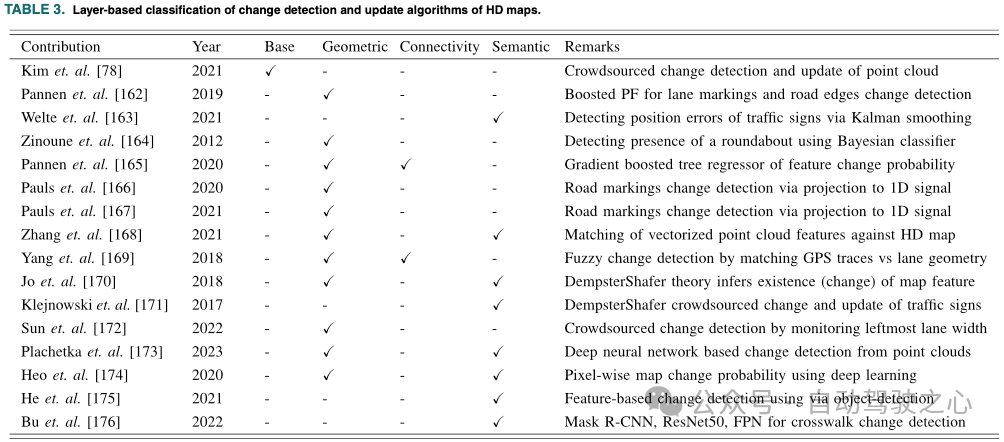
Der Besitz der neuesten HD-Karten ist für den korrekten Betrieb verschiedener AD-Kernkomponenten von entscheidender Bedeutung. Fehler in HD-Karten können aufgrund fehlerhafter Systementscheidungen zu ernsthaften Schäden führen. Durch häufige Aktualisierungen der Kartenfahrzeuge können Fehlentscheidungen vermieden werden. Die Straßenumgebung ist sehr dynamisch und kann sich aufgrund neuer Infrastrukturbauten, Straßeninstandhaltung und Fahrbahnerweiterungen häufig ändern. Das Kartierungsfahrzeug muss in der Lage sein, Veränderungen in der Umgebung zu erkennen und diese zur Aktualisierung der Karte zu senden. Der Kartenaktualisierungsprozess umfasst komplexe Verarbeitungsschritte, einschließlich der Verarbeitung von Daten aus mehreren Quellen und Sensoren in unterschiedlichen Maßstäben, der Identifizierung von Abweichungen zwischen der gespeicherten Karte und neu erfassten Umweltdaten und schließlich der Integration dieser Abweichungen, um die verschiedenen Ebenen der Karte zu aktualisieren. In der Literatur wurden mehrere Methoden und Ansätze entwickelt, um Änderungen in HD-Karten zu erfassen und zu aktualisieren. Im Folgenden besprechen wir verschiedene Methoden und Methoden zur Erkennung von Änderungen in HD-Karten und wie diese Informationen auf Aktualisierungskarten angewendet werden können. Der von uns verfolgte Ansatz zur Untersuchung früherer Bemühungen zur Pflege von HD-Karten basiert auf der Analyse der Ebenen, die mit jeder hochmodernen Methode verwaltet werden, wie in Tabelle 3 dargestellt.
Die Änderungserkennung in HD-Karten bezieht sich auf den Prozess der Erkennung von Änderungen in der Umgebung, wie z. B. Neubauten, Straßensperrungen usw. Die Ebenen der Karte werden dann entsprechend aktualisiert. HD-Karten ändern sich regelmäßig und eine Karte, der selbstfahrende Autos vertrauen können, ist für eine sichere Navigation von entscheidender Bedeutung. Die Änderungserkennung wird typischerweise durch den Einsatz verschiedener Sensoren wie Kameras, Lidar und Radar in Kombination mit Computer-Vision-Algorithmen und maschinellen Lerntechniken erreicht. Schon vor dem Aufkommen hochauflösender Karten haben Algorithmen zur Änderungserkennung Einzug in viele Anwendungen gehalten. Die Fernerkundung ist eine der ersten Anwendungen der Erkennung und Aktualisierung von Kartenänderungen. Es wurde auch erfolgreich in der städtischen Überwachung, Waldveränderungen, Krisenüberwachung, dreidimensionalen Aktualisierung geografischer Informationen, Überwachung des Baufortschritts und Ressourcenerhebungen eingesetzt. Auf der grundlegendsten Ebene besteht bei diesen Anwendungen das Problem darin, rohe Sensordaten zu vergleichen, hauptsächlich 3D-Punktwolken, 2D-Bilder oder eine Kombination aus beidem.
Die zweite Phase der HD-Kartenwartung besteht darin, Kartenelemente basierend auf den Ergebnissen der Änderungserkennung zu aktualisieren. Einfach ausgedrückt entspricht die Kartenaktualisierung einem probabilistischen Datenfusionsproblem. Die kontinuierliche Überwachung von Veränderungen in einer sich ständig verändernden Umgebung nahezu in Echtzeit, die Zusammenführung unterschiedlicher Datenmuster in Zeit und Raum sowie die Aktualisierung mehrerer Ebenen aus unterschiedlichen Quellen ist in der Tat eine herausfordernde Aufgabe. Cadena et al. stellen in ihrem Umfragepapier fest, dass der verteilte Prozess der Aktualisierung und Pflege hochauflösender Karten, die von großen Flotten autonomer Fahrzeuge erstellt und verwendet werden, ein zwingendes Thema für zukünftige Forschung ist. In dieser Richtung schlugen Kim et al. eine Lösung vor, um neue Feature-Layer anhand von Crowdsourcing-Punktwolkendaten auf dem neuesten Stand zu halten. Diese neue Feature-Map bildet die Grundlage für die Konstruktion verschiedener semantischer und geometrischer Features für HD-Karten.
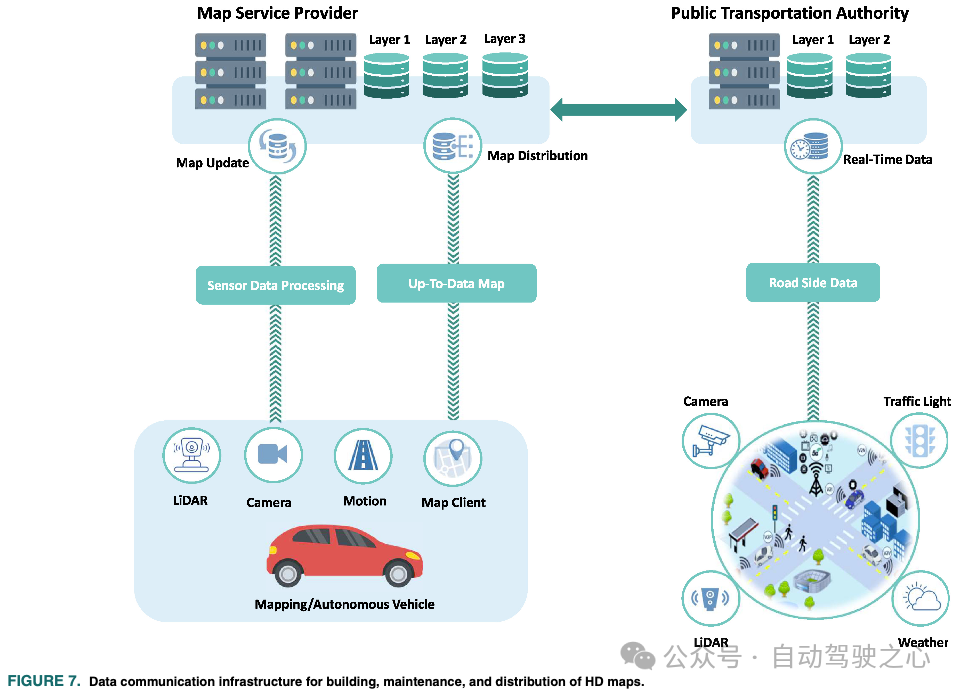
Der Aufbau und die Pflege von HD-Karten in großem Maßstab ist ein Datenaustauschproblem zwischen mehreren Beteiligten, z. B. Regierungen als Eigentümer von ITS-Straßeninfrastruktur, Kartenanbietern und Fahrzeugen, wie in Abbildung 7 dargestellt. Die Sammlung, Erstellung, Pflege und Verteilung von Kartendaten erfordert zuverlässige Kommunikation und eine verteilte Computerinfrastruktur. In diesem Abschnitt wird die Daten- und Kommunikationsinfrastruktur erläutert, die für die Skalierung der Erstellung, Wartung und Verteilung von HD-Karten erforderlich ist.
Während CCAM im letzten Jahrzehnt erhebliche Fortschritte gemacht hat, bleibt die Erreichung einer vollständigen Fahrzeugautonomie eine ungelöste Herausforderung. Damit autonome Fahrzeuge in großem Maßstab eingesetzt werden können, ist eine skalierbare Lösung für die HD-Kartierung von entscheidender Bedeutung. In diesem Abschnitt beleuchten wir die verschiedenen Herausforderungen, die angegangen werden müssen, um das volle Potenzial von HD-Karten-CCAM auszuschöpfen. Es besteht kein Zweifel daran, dass die Verfügbarkeit kostengünstiger und flexibler Lösungen für die Erstellung, Pflege und Verteilung von Kartendaten unter den Beteiligten die Skalierbarkeit von CCAM in zukünftigen Generationen intelligenter Städte erheblich verbessern wird. Darüber hinaus diskutieren wir die Zukunftsaussichten und Anwendungen von HD-Karten.
HD-Mapping ist weiterhin ein schnell wachsender Aspekt realer CCAM-Anwendungen und treibt Innovation und Fortschritt auf diesem Gebiet voran. Obwohl umfangreiche Forschungs- und Entwicklungsarbeiten zur Anwendung von HD-Karten in AD-Systemen sowie zu den Algorithmen und der Infrastruktur für die Erstellung und Pflege von HD-Karten durchgeführt wurden, gibt es nur sehr wenig Literatur, die diese Bemühungen zusammenfassen und ihnen eine Grundlage bieten könnte . Dieses Papier bietet einen umfassenden Überblick über frühere Arbeiten zur Erstellung und Pflege von HD-Karten, einschließlich kosteneffizienter Lösungen, sowie über Kommunikations- und Kartendatenanforderungen von der Erstellung bis zur Verteilung. Darüber hinaus werden in diesem Artikel aktuelle Herausforderungen bei der Erstellung und Pflege von HD-Karten erörtert. Genauer gesagt bieten wir einen unabhängigen Überblick über die HD-Karte als Kontext für die breitere Gemeinschaft intelligenter Transportsysteme. Darüber hinaus diskutieren und analysieren wir die neuesten Technologien zur Nutzung von HD-Karten für verschiedene Kernfunktionen in AD-Systemen. Darüber hinaus diskutieren und überprüfen wir ausführlich verschiedene Ansätze, Methoden und Algorithmen, um HD-Karten auf verschiedenen Ebenen zu erstellen und auf dem neuesten Stand zu halten. Abschließend werfen wir etwas Licht auf die zukünftige Entwicklung von HD-Karten für mobile Anwendungen der nächsten Generation.
Das obige ist der detaillierte Inhalt vonCloudbasiertes und autobasiertes MapNeXt ist fertig! Erstellung hochpräziser Online-Karten der nächsten Generation. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!














![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



