


Ich habe kürzlich eine aktuelle Studie zur reinen visuellen Umgebungswahrnehmung auf Arxiv gelesen. Diese Forschung basiert auf der PETR-Methodenreihe und konzentriert sich auf die Lösung des rein visuellen Wahrnehmungsproblems der Zielerkennung über große Entfernungen, wobei der Wahrnehmungsbereich auf 150 Meter erweitert wird. Die Methoden und Ergebnisse dieses Papiers haben für uns einen großen Referenzwert, daher habe ich versucht, es zu interpretieren
Originaltitel: Far3D: Expanding the Horizon for Surround-view 3D Object Detection
Papierlink: https://arxiv.org/abs /2308.09616
Zugehörigkeit des Autors: Beijing Institute of Technology & Megvii Technology

Die dreidimensionale Objekterkennung spielt eine wichtige Rolle beim Verständnis der dreidimensionalen Szene des autonomen Fahrens und dient der Präzision Lokalisieren und klassifizieren Sie Objekte rund um das Fahrzeug. Reine visuelle Umgebungswahrnehmungsmethoden zeichnen sich durch geringe Kosten und eine breite Anwendbarkeit aus und haben erhebliche Fortschritte gemacht. Die meisten von ihnen konzentrieren sich jedoch auf die Nahbereichserkennung (beispielsweise beträgt der Erfassungsabstand von nuScenes etwa 50 Meter), und der Bereich der Fernerkennung ist weniger erforscht. Die Erkennung entfernter Objekte ist entscheidend für die Einhaltung eines sicheren Abstands während der Fahrt, insbesondere bei hohen Geschwindigkeiten oder bei schwierigen Straßenverhältnissen.
In jüngster Zeit wurden erhebliche Fortschritte bei der 3D-Objekterkennung anhand von Rundumsichtbildern erzielt, die kostengünstig eingesetzt werden können. Die meisten Studien konzentrieren sich jedoch hauptsächlich auf die Erfassungsreichweite im Nahbereich, und es gibt weniger Studien zur Erfassung im Fernbereich. Die direkte Erweiterung vorhandener Methoden zur Abdeckung großer Entfernungen wird mit Herausforderungen wie hohen Rechenkosten und instabiler Konvergenz konfrontiert sein. Um diese Einschränkungen zu beheben, schlägt dieses Papier ein neues, auf spärlichen Abfragen basierendes Framework namens Far3D vor.
Entsprechend der Zwischendarstellung können vorhandene Look-Around-Sensing-Methoden grob in zwei Kategorien unterteilt werden: Methoden, die auf der BEV-Darstellung basieren, und Methoden, die auf der Darstellung spärlicher Abfragen basieren. Die auf der BEV-Darstellung basierende Methode erfordert aufgrund der Notwendigkeit einer intensiven Berechnung der BEV-Merkmale einen sehr großen Rechenaufwand, was eine Ausweitung auf Langstreckenszenarien erschwert. Die auf einer spärlichen Abfragedarstellung basierende Methode lernt die globale 3D-Abfrage aus den Trainingsdaten, der Rechenaufwand ist relativ gering und sie weist eine starke Skalierbarkeit auf. Es weist jedoch auch einige Schwächen auf, obwohl die globale feste Abfrage nicht einfach an dynamische Szenen angepasst werden kann und Ziele bei der Erkennung über große Entfernungen häufig verfehlt werden Datensatz, 3D-Leistungsvergleich zwischen Erkennung und 2D-Erkennung.
Bei der Erkennung über große Entfernungen haben Methoden, die auf einer spärlichen Abfragedarstellung basieren, zwei Hauptherausforderungen. 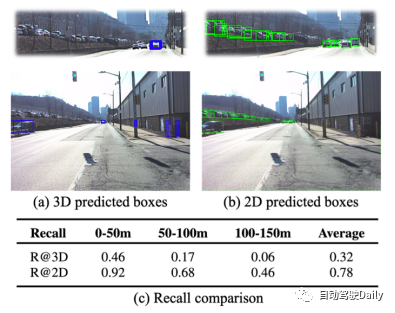
Das erste ist die schlechte Erinnerungsleistung. Aufgrund der geringen Verteilung der Abfragen im 3D-Raum kann in großen Entfernungen nur eine geringe Anzahl passender positiver Abfragen generiert werden. Wie in der Abbildung oben gezeigt, ist die Rückrufrate der 3D-Erkennung niedriger, während die Rückrufrate der vorhandenen 2D-Erkennung viel höher ist, sodass zwischen beiden ein deutlicher Leistungsunterschied besteht. Daher ist die Verwendung hochwertiger 2D-Objektpriors zur Verbesserung der 3D-Abfrage eine vielversprechende Methode, die sich positiv auf die präzise Positionierung und umfassende Abdeckung von Objekten auswirkt.
Zweitens führt die direkte Einführung von 2D-Erkennungsergebnissen zur Unterstützung der 3D-Erkennung zu dem Problem der Fehlerausbreitung. Wie in der folgenden Abbildung dargestellt, sind die beiden Hauptursachen 1) Objektpositionierungsfehler aufgrund einer ungenauen Tiefenvorhersage; 2) 3D-Positionsfehler bei der Kegelstumpftransformation, die mit zunehmender Entfernung zunehmen. Diese verrauschten Abfragen wirken sich auf die Stabilität des Trainings aus und erfordern zur Optimierung wirksame Entrauschungsmethoden. Darüber hinaus zeigt das Modell während des Trainings eine Tendenz zur Überanpassung an dicht besiedelte Objekte in der Nähe, während es dünn verteilte entfernte Objekte ignoriert.
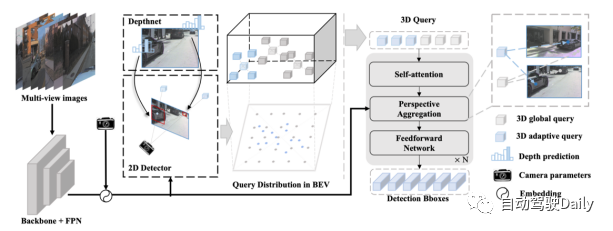
Um Multiskalenmerkmale in das Fernerkennungsmodell einzuführen, wendet dieser Artikel räumlich verformbare 3D-Aufmerksamkeit an. Es führt zunächst eine Offset-Abtastung in der Nähe der 3D-Position durch, die der Abfrage entspricht, und aggregiert dann Bildmerkmale durch 3D-2D-Ansichtstransformation. Der Vorteil dieser Methode gegenüber der globalen Aufmerksamkeit in der PETR-Reihe besteht darin, dass der Rechenaufwand deutlich reduziert werden kann. Konkret lernt das Modell für den Referenzpunkt jeder Abfrage im 3D-Raum M Abtastversätze um ihn herum und projiziert diese Versatzpunkte in verschiedene 2D-Ansichtsmerkmale.

Anschließend interagiert die 3D-Abfrage mit den durch Projektion gewonnenen abgetasteten Features. Auf diese Weise werden verschiedene Merkmale aus unterschiedlichen Perspektiven und Maßstäben unter Berücksichtigung ihrer relativen Bedeutung zu einer dreidimensionalen Abfrage zusammengeführt.
3D-Abfragen mit unterschiedlichen Entfernungen haben unterschiedliche Regressionsschwierigkeiten, was sich von bestehenden 2D-Rauschunterdrückungsmethoden (wie DN-DETR, 2D-Abfragen, die normalerweise gleich behandelt werden) unterscheidet. Der Unterschied im Schwierigkeitsgrad ergibt sich aus der Dichte der Abfrageübereinstimmung und der Fehlerausbreitung. Einerseits ist der Grad der Abfrageübereinstimmung, der entfernten Objekten entspricht, niedriger als der von nahegelegenen Objekten. Andererseits werden bei der Einführung von 2D-Prioritäten in adaptive 3D-Abfragen kleine Fehler in 2D-Objektfeldern verstärkt, ganz zu schweigen davon, dass dieser Effekt mit zunehmender Objektentfernung zunimmt. Daher können einige Abfragen in der Nähe des GT-Felds als positive Abfragen betrachtet werden, während andere mit offensichtlichen Abweichungen als negative Abfragen betrachtet werden sollten. In diesem Artikel wird eine 3D-Rauschunterdrückungsmethode vorgeschlagen, die darauf abzielt, diese positiven Proben zu optimieren und negative Proben direkt zu verwerfen.
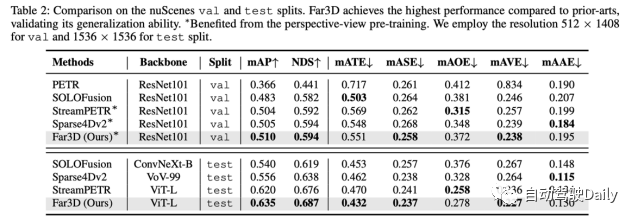
Konkret erstellen die Autoren GT-basierte verrauschte Abfragen, indem sie Gruppen positiver und negativer Stichproben gleichzeitig hinzufügen. Bei beiden Typen wird zufälliges Rauschen basierend auf der Position und Größe des Objekts angewendet, um das Entrauschen des Lernens bei der Fernwahrnehmung zu erleichtern. Konkret handelt es sich bei positiven Stichproben um zufällige Punkte innerhalb der 3D-Box, während negative Stichproben dem GT einen größeren Versatz auferlegen und sich der Versatzbereich mit der Entfernung des Objekts ändert. Mit dieser Methode können während des Trainings verrauschte Kandidaten-Positiv- und falsch-Positiv-Proben simuliert werden. Und nachdem das Modell skaliert wurde, kann es die Leistung mehrerer Lidar-basierter Methoden erreichen und so das Potenzial rein visueller Methoden demonstrieren.
Um die Generalisierungsleistung zu überprüfen, führte der Autor auch Experimente mit dem nuScenes-Datensatz durch und zeigte, dass er sowohl beim Validierungssatz als auch beim Testsatz eine SoTA-Leistung erreichte.
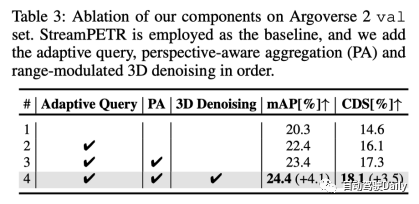
Nach Ablationsexperimenten kamen wir zu folgendem Schluss: 3D-adaptive Abfrage, perspektivbezogene Aggregation und bereichsangepasste 3D-Rauschunterdrückung haben jeweils einen gewissen Gewinn
F : Was ist die Neuheit dieses Artikels?
A: Die Hauptneuheit besteht darin, das Problem der Wahrnehmung von Fernszenen zu lösen. Bei der Ausweitung bestehender Methoden auf Langstreckenszenarien gibt es viele Probleme, einschließlich Rechenkosten und Konvergenzschwierigkeiten. Die Autoren dieses Artikels schlagen einen effizienten Rahmen für diese Aufgabe vor. Obwohl jedes Modul einzeln bekannt vorkommt, dienen sie alle der Erkennung weit entfernter Ziele und haben klare Ziele.
F: Was sind die Unterschiede zwischen MV2D und BevFormer v2?
A: MV2D verlässt sich hauptsächlich auf 2D-Anker, um die entsprechenden Funktionen zum Binden von 3D zu erhalten, es gibt jedoch keine explizite Tiefenschätzung, sodass die Unsicherheit für entfernte Objekte relativ groß ist und es dann hauptsächlich schwierig ist, BevFormer v2 zu konvergieren Behebt die Domänenlücke zwischen dem 2D-Backbone und der 3D-Aufgabenszene. Im Allgemeinen ist das für die 2D-Erkennungsaufgabe vorab trainierte Backbone nicht in der Lage, die 3D-Szene zu erkennen, und untersucht die Probleme bei Fernaufgaben nicht.
F: Kann das Timing verbessert werden, z. B. die Weitergabe von Abfragen plus Feature-Weitergabe?
A: Theoretisch ist es machbar, bei praktischen Anwendungen sollte jedoch ein Kompromiss zwischen Leistung und Effizienz in Betracht gezogen werden.
F: Gibt es Bereiche, die verbessert werden müssen?
A: Sowohl Long-Tail-Probleme als auch langfristige Bewertungsindikatoren verdienen eine Verbesserung. Auf einem 26-Klassen-Ziel wie Argoverse 2 schneiden Modelle bei Long-Tail-Klassen nicht gut ab und verringern letztendlich die durchschnittliche Genauigkeit, was noch nicht untersucht wurde. Andererseits ist die Verwendung einheitlicher Metriken zur Bewertung entfernter und naher Objekte möglicherweise nicht angemessen, was die Notwendigkeit praktischer dynamischer Bewertungskriterien unterstreicht, die an verschiedene Szenarien in der realen Welt angepasst werden können.

Originallink: https://mp.weixin.qq.com/s/xxaaYQsjuWzMI7PnSmuaWg
Das obige ist der detaillierte Inhalt vonAAAI2024: Far3D – Innovative Idee zur direkten visuellen 3D-Zielerkennung von 150 m. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Empfohlene Tools zur Festplattenerkennung
Empfohlene Tools zur Festplattenerkennung
 Der Unterschied und die Verbindung zwischen C-Sprache und C++
Der Unterschied und die Verbindung zwischen C-Sprache und C++
 Der Computer kann nicht kopieren und einfügen
Der Computer kann nicht kopieren und einfügen
 WeChat konnte keine Daten laden
WeChat konnte keine Daten laden
 Das heißt, die Verknüpfung kann nicht gelöscht werden
Das heißt, die Verknüpfung kann nicht gelöscht werden
 Was ist ein UI-Designer?
Was ist ein UI-Designer?
 BatterieMon
BatterieMon
 Lösung für Socket-Fehler 10054
Lösung für Socket-Fehler 10054








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



