


Ein Forscherteam der Princeton University, der Stanford University und Google nutzte das GPT-3-Davinci-Modell von OpenAI, um einen Roboter namens TidyBot zu entwickeln, der englische Anweisungen verstehen und Hausarbeiten erledigen kann. Dieser Roboter kann Aufgaben wie das Sortieren von Wäsche, das Aufsammeln von Müll auf dem Boden und das Aufsammeln von Spielzeug automatisch erledigen, je nach den Vorlieben des Benutzers.
Das GPT-3 Davinci-Modell ist ein Deep-Learning-Modell, Teil der GPT-Modellfamilie, das natürliche Sprache verstehen und generieren kann. Das Modell verfügt über leistungsstarke Zusammenfassungsfunktionen und kann komplexe Objektattribute und -beziehungen aus großen Textdatenmengen lernen. Die Forscher nutzten diese Fähigkeit, um den Roboter Objekte auf der Grundlage mehrerer vom Benutzer bereitgestellter Beispielobjekte platzieren zu lassen, z. B. „Gelbes Hemd in der Schublade, dunkelviolettes Hemd im Schrank, weiße Socken in der Schublade“, und ließen das Modell dann schließen Allgemeine Präferenzregeln des Benutzers und wenden sie auf zukünftige Interaktionen an.
Die Forscher schrieben in der Arbeit: „Unsere grundlegende Erkenntnis ist, dass die Zusammenfassungsfähigkeiten von LLMs (Large Language Models) gut zu den Generalisierungsanforderungen personalisierter Roboter passen. LLMs zeigen eine erstaunliche Fähigkeit, mithilfe von Complex eine Generalisierung durch Zusammenfassung zu erreichen.“ Objekteigenschaften und -beziehungen, die aus umfangreichen Textdatensätzen gelernt wurden.
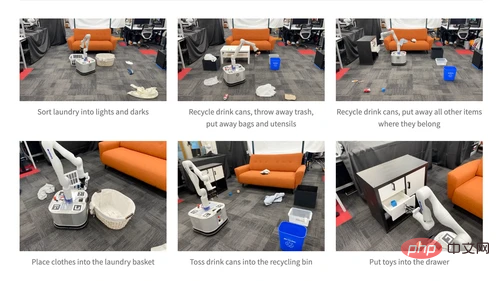
Sie schreiben außerdem: „Im Gegensatz zu herkömmlichen Methoden, die eine teure Datenerfassung und Modellschulung erfordern, zeigen wir, dass LLM direkt im Robotikbereich implementiert werden kann und dabei die Vorteile nutzt.“ Leistungsstarke Zusammenfassungsfähigkeiten, die sie aus riesigen Textdatenmengen lernen.“ Auf der Website der Zeitung demonstrierten die Forscher einen Roboter, der Wäsche in helle und dunkle Farben klassifizieren, Getränkedosen recyceln und den Müll wegwerfen, Tüten und Geschirr einpacken und loslegen kann Bringen Sie Gegenstände wieder an ihren Platz und verstauen Sie Spielsachen in Schubladen.
Die Forscher testeten zunächst einen textbasierten Benchmark-Datensatz, in den Benutzerpräferenzen eingegeben wurden und das Modell gebeten wurde, Personalisierungsregeln zu erstellen, um die Artikelzuordnung zu bestimmen. Das Modell fasst die Beispiele in allgemeinen Regeln zusammen und verwendet die Zusammenfassung, um zu bestimmen, wo neue Elemente platziert werden sollen. Basisszenen werden in vier Räumen mit 24 Szenen in jedem Raum definiert. Jede Szene enthält zwischen zwei und fünf Orte zum Platzieren von Gegenständen, und das Modell muss die gleiche Anzahl sichtbarer und unsichtbarer Gegenstände klassifizieren. Der Test erreichte eine Genauigkeit von 91,2 % bei unsichtbaren Elementen, schrieben sie.
Als sie diesen Ansatz auf einen realen Roboter, TidyBot, anwendeten, stellten sie fest, dass dieser 85 % der Objekte erfolgreich aufnehmen konnte. TidyBot wurde in acht realen Szenarien mit jeweils zehn Objekten getestet und der Roboter wurde in jedem Szenario dreimal ausgeführt. Laut IT House verwendet TidyBot neben LLM auch einen Bildklassifizierer namens CLIP und einen Objektdetektor namens OWL-ViT.
Danfei Xu, Assistenzprofessor an der School of Interactive Computing des Georgia Institute of Technology, sagte, als er über das PaLM-E-Modell von Google sprach, dass LLM Robotern mehr Fähigkeiten zur Problemlösung verleiht. „Die meisten früheren Missionsplanungssysteme stützten sich auf irgendeine Form von Such- oder Optimierungsalgorithmen, die weniger flexibel und schwierig zu erstellen waren. LLM und multimodales LLM ermöglichen es diesen Systemen, von Daten im Internetmaßstab zu profitieren und sie problemlos zur Lösung neuer Probleme zu nutzen“, sagte er .
Das obige ist der detaillierte Inhalt vonForscher entwickeln Roboter, der englische Befehle verstehen und Hausarbeiten erledigen kann. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
















![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



