


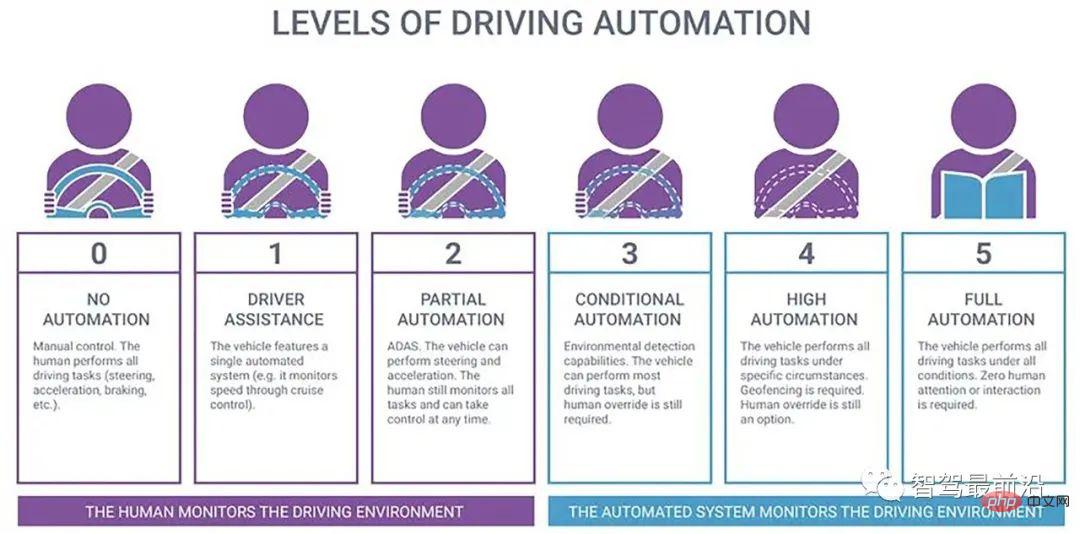
Die American Society of Automotive Engineers unterteilt autonomes Fahren in sechs Stufen, L0-L5, basierend auf dem Grad der Fahrzeugintelligenz:
01 Umgebungswahrnehmungstechnologie
Zu den häufig verwendeten Umgebungswahrnehmungssensoren für autonome Fahrzeuge gehören: Kameras, Lidar, Millimeterwellenradar, Infrarot- und Ultraschallradar usw. Kameras sind das am häufigsten verwendete, einfachste und dem Abbildungsprinzip des menschlichen Auges am nächsten kommende Prinzip von Umgebungswahrnehmungssensoren für autonome Fahrzeuge. Durch die Erfassung der Umgebung des Fahrzeugs in Echtzeit wird die CV-Technologie zur Analyse der aufgenommenen Bilder eingesetzt, um Funktionen wie die Erkennung von Fahrzeugen und Fußgängern sowie die Erkennung von Verkehrszeichen rund um das Fahrzeug zu erreichen.
Millimeterwellenradar ist auch ein häufig verwendeter Sensor für autonome Fahrzeuge. Millimeterwellenradar bezieht sich auf Radar, das im Millimeterwellenband (Wellenlänge 1–10 mm, Frequenzbereich 30–300 GHz) arbeitet Basierend auf der ToF-Technologie (Time of Flight) erkennt es Zielobjekte. Das Millimeterwellenradar sendet kontinuierlich Millimeterwellensignale an die Außenwelt und empfängt das vom Ziel zurückgegebene Signal. Es bestimmt die Entfernung zwischen dem Ziel und dem Fahrzeug anhand der Zeitdifferenz zwischen dem Senden und Empfangen des Signals. Daher wird Millimeterwellenradar hauptsächlich zur Vermeidung von Kollisionen zwischen Autos und umgebenden Objekten verwendet, z. B. zur Erkennung des toten Winkels, zur Unterstützung bei der Vermeidung von Hindernissen, zur Einparkhilfe, zur adaptiven Geschwindigkeitsregelung usw. Millimeterwellenradar verfügt über eine starke Entstörungsfähigkeit, und seine Fähigkeit, Regen, Sand, Staub, Rauch und Plasma zu durchdringen, ist viel stärker als Laser und Infrarot und kann bei jedem Wetter eingesetzt werden. Es weist jedoch auch Nachteile auf, wie z. B. große Signaldämpfung, leichte Blockierung durch Gebäude, menschliche Körper usw., kurze Übertragungsentfernung, geringe Auflösung und Schwierigkeiten bei der Bildgebung.
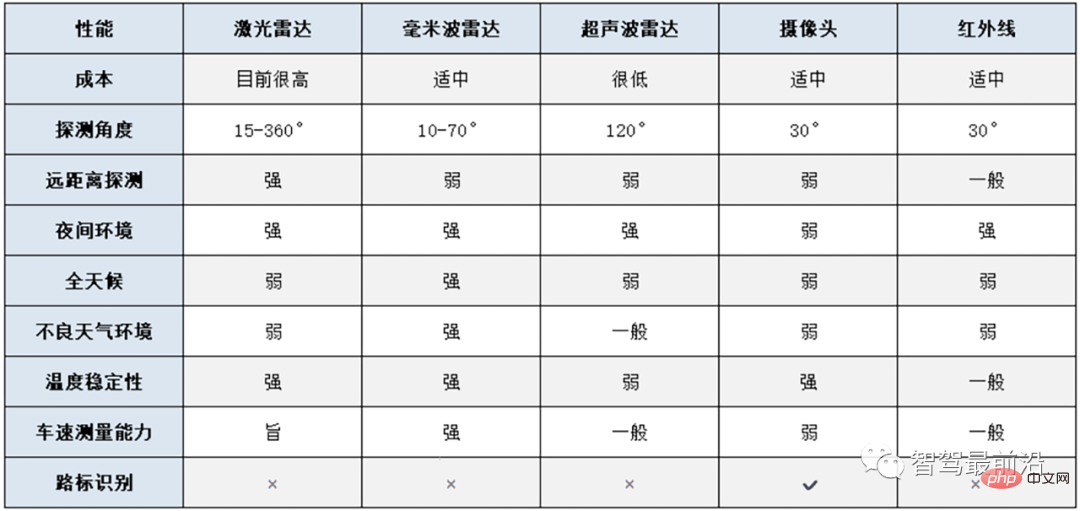
Lidar nutzt auch die ToF-Technologie, um den Zielort und die Entfernung zu bestimmen. LiDAR erkennt Ziele durch das Aussenden von Laserstrahlen und seine Erkennungsreichweite ist größer. Allerdings ist LiDAR anfälliger für Störungen durch Regen, Schnee, Dunst usw. in der Luft und seine hohen Kosten schränken es ebenfalls ein seine Anwendung. Fahrzeugmontierte Lidar-Geräte können entsprechend der Anzahl der emittierten Laserstrahlen in einzeilige, 4-zeilige, 8-zeilige, 16-zeilige und 64-zeilige Lidar-Geräte unterteilt werden. Anhand der folgenden Tabelle (Tabelle 1) können Sie die Vor- und Nachteile gängiger Sensoren vergleichen.
Die Wahrnehmung der autonomen Fahrumgebung übernimmt normalerweise „schwache Wahrnehmung + Superintelligenz“ und die beiden großen technischen Wege „starke Wahrnehmung + starke Intelligenz“. Die Technologie „schwache Wahrnehmung + Superintelligenz“ basiert hauptsächlich auf Kameras und Deep-Learning-Technologie, um die Umgebungswahrnehmung zu erreichen, und nicht auf Lidar. Bei dieser Technologie wird davon ausgegangen, dass Menschen mit zwei Augen fahren können und dass sich das Auto auch auf Kameras verlassen kann, um die Umgebung klar zu sehen. Wenn es vorübergehend schwierig ist, Superintelligenz zu erreichen, ist es für das Erreichen des fahrerlosen Fahrens notwendig, die Wahrnehmungsfähigkeiten zu verbessern. Dies ist der sogenannte technische Weg „starke Wahrnehmung + starke Intelligenz“.
Verglichen mit der technischen Route „schwache Wahrnehmung + Superintelligenz“ ist das größte Merkmal der technischen Route „starke Wahrnehmung + starke Intelligenz“ die Hinzufügung eines Lidar-Sensors. Dadurch wird die Wahrnehmung deutlich verbessert. Tesla wählt den technischen Weg „schwache Intelligenz + Superintelligenz“, während Google Waymo, Baidu Apollo, Uber, Ford Motor und andere Unternehmen für künstliche Intelligenz, Reiseunternehmen und traditionelle Automobilhersteller alle den technischen Weg „starke Wahrnehmung + starke Intelligenz“ wählen.
Der Zweck der Positionierung besteht darin, die Positionierung des Autonomen zu erhalten Fahrzeug relativ zur äußeren Umgebung Die genaue Ortung ist eine wesentliche Grundlage für autonome Fahrzeuge. Beim Fahren auf komplexen Stadtstraßen erfordert die Positionierungsgenauigkeit einen Fehler von nicht mehr als 10 cm. Zum Beispiel: Nur wenn wir den Abstand zwischen dem Fahrzeug und der Kreuzung genau kennen, können wir genauere Vorhersagen und Vorbereitungen treffen. Nur durch die genaue Positionierung des Fahrzeugs können wir die Fahrspur bestimmen, auf der sich das Fahrzeug befindet. Wenn der Positionierungsfehler hoch ist, kann es zu einem vollständigen Verkehrsunfall kommen.
GPS ist derzeit die am weitesten verbreitete Ortungsmethode. Je höher die GPS-Genauigkeit, desto teurer ist der GPS-Sensor. Allerdings ist die aktuelle Positionierungsgenauigkeit der kommerziellen GPS-Technologie bei weitem nicht ausreichend. Ihre Genauigkeit liegt nur im Meterbereich und kann leicht durch Faktoren wie Tunnelbehinderung und Signalverzögerung beeinträchtigt werden. Um dieses Problem zu lösen, hat Qualcomm eine Vision-Enhanced-High-Precision-Positioning-Technologie (VEPP) entwickelt, die Informationen aus mehreren Automobilkomponenten wie der globalen GNSS-Navigation, Kameras, IMU-Trägheitsnavigation und gegenseitigen Radgeschwindigkeitssensoren integriert Fusion, um eine globale, fahrspurgenaue Echtzeitpositionierung zu erreichen.
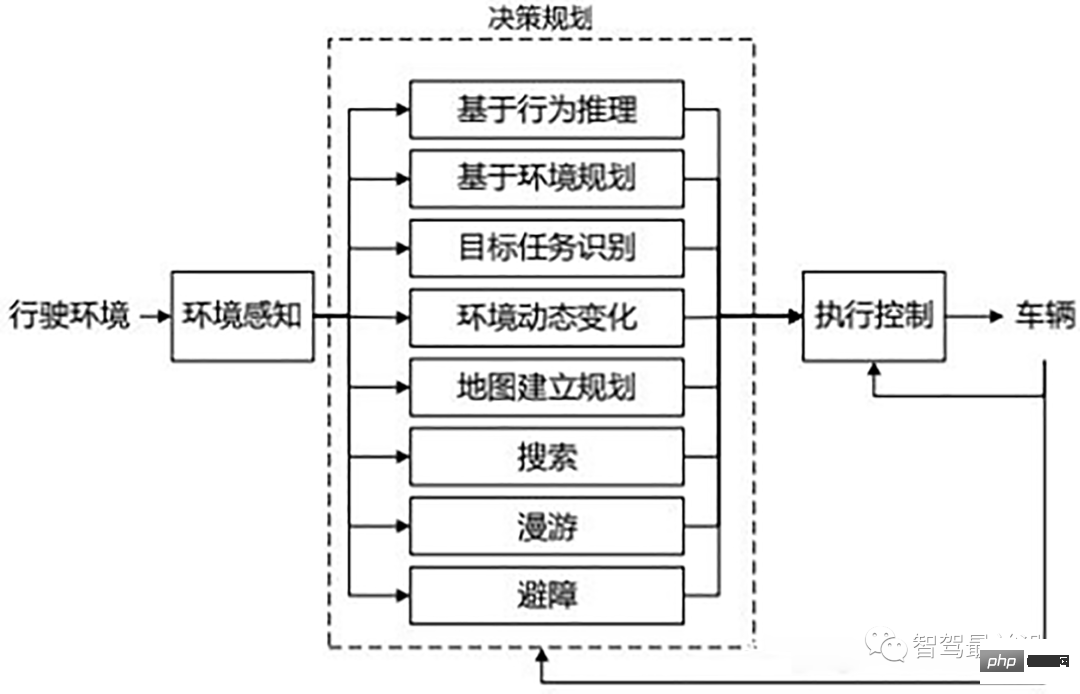
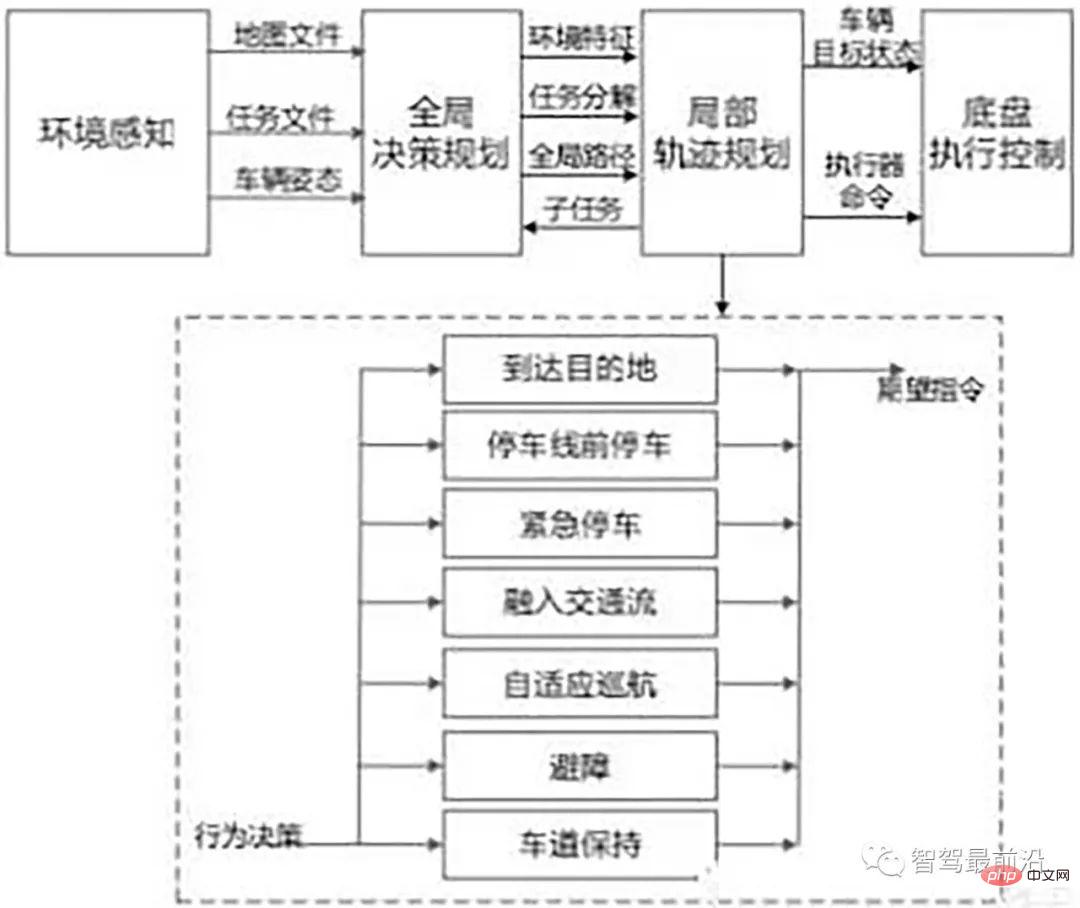
Entscheidungsplanung ist einer der Schlüsselbestandteile des autonomen Fahrens Es führt zunächst Multisensorinformationen zusammen und trifft dann Aufgabenentscheidungen basierend auf den Fahranforderungen. Anschließend kann es mehrere sichere Wege zwischen zwei Punkten planen und dabei bestehende Hindernisse vermeiden und einen optimalen Weg unter diesen Wegen auswählen Die Fahrbahn des Fahrzeugs wird geplant. Je nach Unterteilungsebene kann es in zwei Arten unterteilt werden: Globale Planung und lokale Planung. Bei der globalen Planung geht es darum, auf der Grundlage der erhaltenen Karteninformationen einen kollisionsfreien optimalen Weg unter bestimmten Bedingungen zu planen. Beispielsweise gibt es viele Straßen von Shanghai nach Peking. Die Planung einer davon als Fahrroute ist die Gesamtplanung.
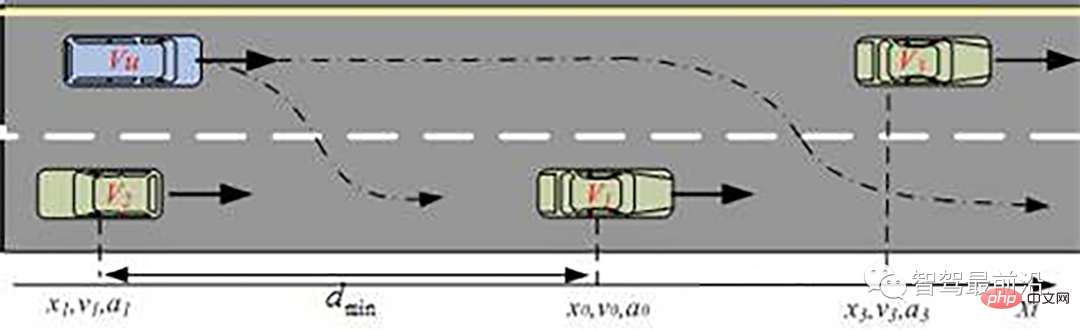
Statische Pfadplanungsalgorithmen wie Gittermethode, visuelle Diagrammmethode, Topologiemethode, Freiraummethode, neuronale Netzwerkmethode usw. Lokale Planung basiert auf globaler Planung und auf der Grundlage einiger lokaler Umweltinformationen ist es ein Prozess, der Kollisionen mit einigen unbekannten Hindernissen vermeiden und schließlich den Zielpunkt erreichen kann. Beispielsweise wird es auf der global geplanten Route von Shanghai nach Peking andere Fahrzeuge oder Hindernisse geben. Wenn Sie diesen Hindernissen oder Fahrzeugen ausweichen möchten, müssen Sie abbiegen und die Fahrspur anpassen. Zu den lokalen Pfadplanungsmethoden gehören: Methode des künstlichen Potenzialfelds, Methode des Vektordomänen-Histogramms, Methode des virtuellen Kraftfelds, genetischer Algorithmus und andere dynamische Pfadplanungsalgorithmen.
Die Entscheidungs- und Planungsebene ist das autonome Fahrsystem. Sie ist ein direktes Spiegelbild der Intelligenz und spielt eine entscheidende Rolle für die Fahrsicherheit des Fahrzeugs und des gesamten Fahrzeugs und reaktiv und eine Mischung aus beidem.
Die hierarchische progressive Architektur ist die Struktur eines Seriensystems. In diesem System ist die Ausgabe des vorherigen Moduls die Eingabe des nächsten Moduls wird als Wahrnehmungsplanungs-Aktionsstruktur bezeichnet. Allerdings ist die Zuverlässigkeit dieser Struktur nicht hoch. Sobald in einem bestimmten Modul ein Software- oder Hardwarefehler auftritt, wird der gesamte Informationsfluss beeinträchtigt und das gesamte System wird wahrscheinlich zusammenbrechen oder sogar lahmgelegt.

Die reaktive Architektur nimmt eine parallele Struktur an. Die Kontrollschicht kann Entscheidungen direkt auf der Grundlage der Eingaben des Sensors treffen. die die wahrgenommenen Aktionen hervorheben können, geeignet für völlig unbekannte Umgebungen. Bei vielen Verhaltensweisen in der reaktiven Architektur handelt es sich hauptsächlich um einfache Spezialaufgaben, sodass Planung und Steuerung eng integriert werden können und der belegte Speicherplatz nicht groß ist, sodass schnelle Reaktionen und eine starke Echtzeitleistung erzielt werden können Gleichzeitig muss jede Schicht nur für ein bestimmtes Verhalten des Systems verantwortlich sein. Das gesamte System kann den Übergang von der niedrigen zur hohen Ebene bequem und flexibel realisieren. Darüber hinaus kann das verbleibende Modul einen unerwarteten Fehler aufweisen Ebenen können immer noch sinnvolle Ergebnisse liefern, die Robustheit des Systems wurde jedoch erheblich verbessert. Die Schwierigkeit besteht darin, dass aufgrund der Flexibilität der Aktionsausführung ein spezifischer Koordinationsmechanismus erforderlich ist, um die Konflikte zwischen den verschiedenen Regelkreisen zu lösen und sich darauf zu einigen die Behauptung des Aktors, um ein aussagekräftiges Ergebnis zu erhalten.
Die Struktur des hierarchischen Systems und die Struktur des reaktiven Systems haben beide ihre eigenen Vor- und Nachteile, und es ist für sie schwierig, die komplexen und sich ändernden Anforderungen der Fahrumgebung allein zu erfüllen Immer mehr Branchenexperten haben damit begonnen, hybride Architekturen zu untersuchen und die Vorteile beider effektiv zu kombinieren, um hierarchische hierarchische Verhaltensweisen zu erzeugen, die durch Ziele auf der globalen Planungsebene und eine zielorientierte Suche auf der lokalen Planungsebene definiert werden .
Die Kernsteuerungstechnologie des autonomen Fahrens ist die Längssteuerung, Quersteuerung, Längssteuerung sowie Fahr- und Bremssteuerung des Fahrzeugs, und die Quersteuerung ist die Lenkung Rad Die Einstellung des Winkels und die Steuerung der Reifenkraft ermöglichen eine automatische Längs- und Quersteuerung, und der Fahrzeugbetrieb kann entsprechend vorgegebenen Zielen und Einschränkungen automatisch gesteuert werden.
Die Längsregelung des Fahrzeugs ist die Regelung in Richtung der Fahrgeschwindigkeit, also die automatische Regelung der Fahrzeuggeschwindigkeit und des Abstands zwischen dem Fahrzeug und den vorausfahrenden oder dahinter liegenden Fahrzeugen bzw. Fahrzeugen Hindernisse. Tempomat und Notbremsassistent sind typische Beispiele für die Längsregelung beim autonomen Fahren. Bei dieser Art von Steuerungsproblem geht es um die Steuerung von Motorantrieben, Motoren, Getrieben und Bremssystemen. Verschiedene Motor-Motor-Getriebe-Modelle, Fahrzeugbetriebsmodelle und Bremsprozessmodelle werden mit unterschiedlichen Regleralgorithmen zu verschiedenen Längsregelungsmodi kombiniert.
Die seitliche Kontrolle des Fahrzeugs bezieht sich auf die Kontrolle senkrecht zur Bewegungsrichtung. Ziel ist es, das Auto so zu steuern, dass es automatisch die gewünschte Fahrroute beibehält und bei unterschiedlichen Fahrzeuggeschwindigkeiten, Lasten, Windwiderständen und Straßenbedingungen einen guten Fahrkomfort und eine gute Stabilität erreicht. Es gibt zwei grundlegende Entwurfsmethoden für die Fahrzeugquersteuerung. Eine basiert auf der Fahrersimulation (eine besteht darin, ein einfacheres Dynamikmodell und Fahrermanipulationsregeln zum Entwerfen des Controllers zu verwenden; die andere besteht darin, den Manipulationsprozess des Fahrers zu verwenden. Der Datentrainingscontroller erhält die Der andere ist eine Steuermethode, die das Modell der Querbewegungsmechanik des Fahrzeugs liefert (es muss ein genaues Modell der Querbewegung des Fahrzeugs erstellt werden. Ein typisches Modell ist beispielsweise ein Einspurmodell, das die Eigenschaften der linken und rechten Seite berücksichtigt
Neben der oben vorgestellten Umgebungswahrnehmung, präzisen Positionierung, Entscheidungsplanung und Steuerungsausführung beinhalten autonome Fahrzeuge auch Schlüsseltechnologien wie hochpräzise Karten , V2X und autonome Fahrzeugtests. Autonome Fahrtechnologie ist eine Kombination aus künstlicher Intelligenz, Hochleistungschips, Kommunikationstechnologie, Sensortechnologie, Fahrzeugsteuerungstechnologie, Big-Data-Technologie und anderen Mehrfeldtechnologien. Die Technologie ist schwierig zu implementieren. Darüber hinaus ist es für die Umsetzung autonomer Fahrtechnologie erforderlich, grundlegende Transporteinrichtungen einzurichten, die den Anforderungen des autonomen Fahrens gerecht werden, und Gesetze und Vorschriften zum autonomen Fahren zu berücksichtigen.
Das obige ist der detaillierte Inhalt vonEin Artikel, der die wichtigsten technischen Schwierigkeiten des autonomen Fahrens erläutert. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Welche Fähigkeiten sind erforderlich, um in der PHP-Branche zu arbeiten?
Welche Fähigkeiten sind erforderlich, um in der PHP-Branche zu arbeiten?
 Wo beginnt der Index des PHP-Arrays?
Wo beginnt der Index des PHP-Arrays?
 Fensterhandle-Methode abrufen
Fensterhandle-Methode abrufen
 kb4012212 Was tun, wenn das Update fehlschlägt?
kb4012212 Was tun, wenn das Update fehlschlägt?
 Was ist Lawine?
Was ist Lawine?
 Die heutige Toutiao-Goldmünze entspricht 1 Yuan
Die heutige Toutiao-Goldmünze entspricht 1 Yuan
 So überprüfen Sie tote Links auf Ihrer Website
So überprüfen Sie tote Links auf Ihrer Website
 Was ist Vuex?
Was ist Vuex?








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



