


In den Positionierungs-, Wahrnehmungs-, Vorhersage-, Entscheidungsplanungs- und Steuerungsmodulen des autonomen Fahrens ist das Wahrnehmungsmodul wie menschliche Augen und Ohren für die Wahrnehmung der äußeren Umgebung verantwortlich die endgültige Beschleunigung, Verzögerung, Lenkung und andere Vorgänge; und das Entscheidungsplanungsmodul ist wie das menschliche Gehirn, das Verhaltensentscheidungen und die Flugbahngenerierung auf der Grundlage der empfangenen Wahrnehmung und anderer Informationen trifft.
Willkommen beim WeChat-Videokonto „Smart Driving Frontier“. So wie das menschliche Gehirn in die linke und die rechte Gehirnhälfte unterteilt ist, kann das Entscheidungsplanungsmodul weiter in das Verhalten unterteilt werden Entscheidungsebene (Behavioral Layer) und Sportplanungsebene (Motion Planning).
Nachdem die Verhaltensentscheidungsschicht die sensorischen Informationen kombiniert, um spezifische Verhaltensentscheidungen zu treffen, plant die Bewegungsplanungsschicht eine Flugbahn, die bestimmte Einschränkungen erfüllt Die Trajektorie wird als Eingabe für das Steuermodul verwendet, um den endgültigen Fahrweg des Fahrzeugs zu bestimmen.
Da sich das Niveau des autonomen Fahrens immer weiter verbessert, hat auch die Bedeutung der Entscheidungs- und Planungsebene als Gehirn des autonomen Fahrens zugenommen. Doch im Vergleich zum menschlichen Gehirn hat das Gehirn des autonomen Fahrens noch einen langen Rückstand auf sich. In diesem Artikel werden die Probleme und Herausforderungen der Bewegungsplanung bei der Pfadplanung anhand von zehntausend Worten detailliert beschrieben.
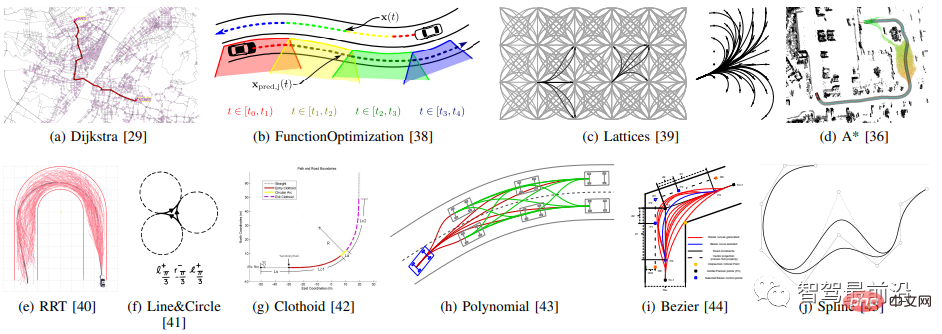
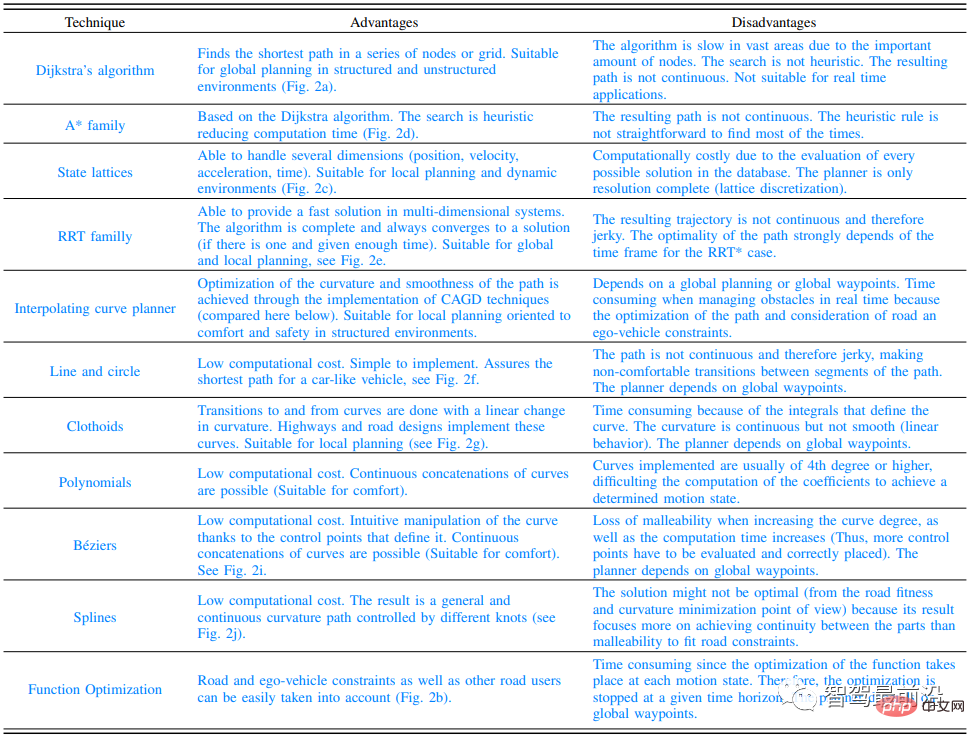
Bewegungsplanungsalgorithmen wurden aus dem Bereich der Robotik entwickelt und haben nach und nach verschiedene Algorithmen entwickelt, die für den Bereich des autonomen Fahrens geeignet sind. Der Artikel [1] bietet einen Überblick über die Trajektoriengenerierungsmethode der Bewegungsplanung. Die vorgestellte Methode ist in der folgenden Abbildung dargestellt.
Sampling-Suchalgorithmen: Dijkstra, RRT, A*, HybridA* und Lattice usw.;
Kurveninterpolationsbasierte Algorithmen: RS-Kurve, Dubins-Kurve, Polynom Kurve, Bezier-Kurven und Splines usw.;
Basierend auf Optimierungsalgorithmen: Apollo’s Piecewise-Ruck usw.;
Problem des kognitiven Denkens; 🎜 #
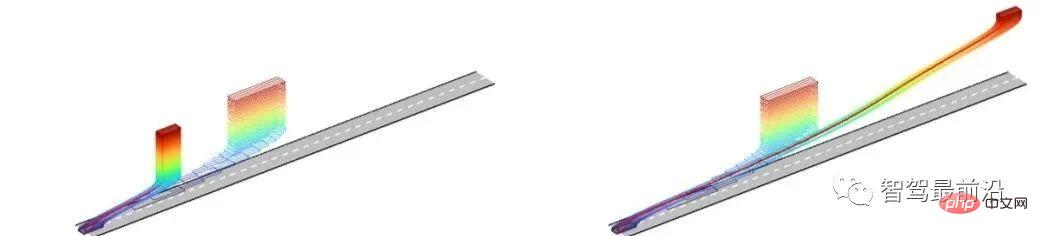
Unsicherheit/Wahrscheinlichkeit; Einzelner Agent; technische Probleme 2.1 Optimalitätsproblem Globale Optimalität ist ein NP-schweres Problem [3]. Für die Echtzeitleistung verwendet der Großteil der Branche horizontale und vertikale Entkopplungsplanungsmethoden. Dadurch wird jedoch die Optimalität geopfert, und unter bestimmten Arbeitsbedingungen wie Überholen [2], entgegenkommenden Fahrzeugen, Verarbeitung von Zentripetalbeschleunigungsbeschränkungen und horizontaler Planung, die die Berücksichtigung der Längsplanungsfähigkeiten erfordert, kann kein gutes Fahrzeugverhalten erzielt werden. Wenn sich beispielsweise vor dem Autonomous Driving Car (ADC) ein verlangsamendes Fahrzeug befindet, funktioniert die horizontale und vertikale Entkopplungsmethode im Allgemeinen nur, wenn die Geschwindigkeit des vorausfahrenden Fahrzeugs auf einen bestimmten Wert sinkt . Überholen. Das Verhalten des ADC besteht darin, zuerst abzubremsen oder sogar anzuhalten und dann um Hindernisse herumzufahren. Dies ist offensichtlich nicht die optimale Fahrstrategie. Wenn eine räumlich-zeitlich integrierte Planungsmethode angewendet wird, können Verzögerungs- oder Parkverhalten vermieden werden. Das linke Bild in der Abbildung unten ist ein Beispiel für die Entkopplungsmethode. Wenn sich ein abbremsendes und parkendes Fahrzeug vor Ihnen befindet, bremst der ADC ab. Das Bild rechts ist ein Beispiel für die räumlich-zeitliche Planung, wenn das vorausfahrende Fahrzeug langsamer wird.2.2 Probleme beim kognitiven Denken
 2.2.1 Denken in der Kartentopologie
2.2.1 Denken in der Kartentopologie
Wenn außerdem kein HD-Kartenmodul vorhanden ist und ausschließlich auf visuelle Fahrspurlinien angewiesen ist, ist die Wahrnehmung der Fahrspurlinien zu diesem Zeitpunkt abnormal. Das Problem der Straßentopologie tritt besonders bei den ein- und ausgehenden Straßen und Kreuzungsstraßen in den Vordergrund.
2.2.2 Einheitliche Modellierung von HindernissenZu den Teilnehmern an Verkehrsszenen gehören Fahrzeuge, Motorräder, Fahrräder, Fußgänger, Kegel usw. Im Großen und Ganzen umfasst es auch statische Kartenelemente wie Zebrastreifen, Ampeln und Geschwindigkeitsbegrenzungen auf Straßen. Die Bewegungsplanung muss für verschiedene Elemente unterschiedliche Entscheidungen treffen. Eine einheitliche Modellierung von Hindernissen kann das Problem vereinfachen und die Berechnungseffizienz verbessern.
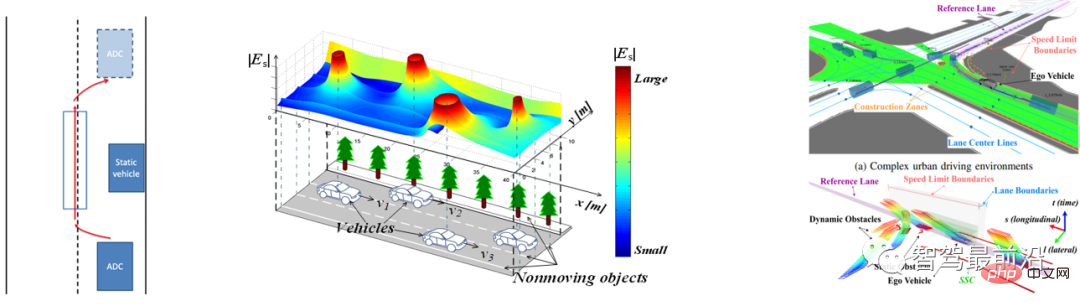
Aopllo abstrahiert alle Verkehrsteilnehmer in statisches Hindernis, dynamisches Hindernis und virtuelles Hindernis ist die Box, statisches Hindernis und dynamisches Hindernis sind Fahrzeuge, Fußgänger usw. und virtuelles Hindernis sind Fußgängerüberwege, Parkverbotsbereiche usw. Virtuelle Hindernisse werden bei der Pfadplanung nicht berücksichtigt.
Verwenden Sie energiefeldbezogene Methoden zur Darstellung von Verkehrsteilnehmern mithilfe von Energiefunktionen. Das mittlere Bild im obigen Bild ist das von Tsinghua [4] vorgeschlagene Fahrsicherheitsfeld, das aus dem potenziellen Energiefeld stationärer Objekte, dem kinetischen Energiefeld sich bewegender Objekte und dem Verhaltensfeld des Fahrers besteht. Die optimale Flugbahn besteht darin, eine Flugbahn mit minimaler Energiesumme zu finden.
Das Papier [5] unterteilt die Verkehrsteilnehmer in hindernisartige und hindernisartige. Hindernisartig sind dynamische und statische Fahrzeuge, rote Ampeln usw., die auf das 3D-Raster von SLT abgebildet werden. Zwanghaft sind Geschwindigkeitsbegrenzungen, Stoppschilder etc. als semantische Grenzen. Gemäß den Aktionen der Entscheidungssequenz werden im SLT-Konfigurationsraum mehrere Würfelgrenzen für die Trajektoriengenerierung generiert.
2.2.3 Szenario kognitives Denken
Aufgrund der Komplexität der realen Umgebung ist es für eine Entscheidungsstrategie oder Planungsmethode schwierig, mit unterschiedlichen Arbeitsbedingungen umzugehen. Daher kann die Klassifizierung der Fahrumgebung und die Auswahl verschiedener Strategien in verschiedenen Szenarien die Leistung der Bewegungsplanung verbessern. Wie führt man also die Szenenklassifizierung und Szenenerkennung durch und was sind die Unterschiede zwischen der Bewegungsplanung in verschiedenen Szenen? Diese Probleme müssen alle gelöst werden.
Die Szenenklassifizierung in Aopllo ist LANE_FOLLOW, SIDE_PASS, STOP_SIGN_UNPROTECTED usw. Es gibt zwei Methoden zur Szenenerkennung: eine durch Regeln und die andere durch maschinelles Lernen. Verschiedene Szenarien haben unterschiedliche Phasen und Aufgaben werden in den Phasen nacheinander ausgeführt. Sogar die gleiche Aufgabe kann in unterschiedlichen Szenarien unterschiedliche Parameterkonfigurationen haben.
Basierend auf den Merkmalen städtischer Szenen mit vielen Kreuzungen, Staus und Spurwechseln unterteilt Haimou Fahrszenen in zehn Kategorien, was sich offensichtlich von der Szenarioklassifizierung in Apollo unterscheidet. Die Szenenerkennungsmethode von Haimou ist jedoch unbekannt. Hao Mo schlug außerdem das Konzept der Fahrumgebungsentropie vor, um den Überlastungszustand der Fahrumgebung zu beschreiben.
2.3.1 Positionierungsunsicherheit
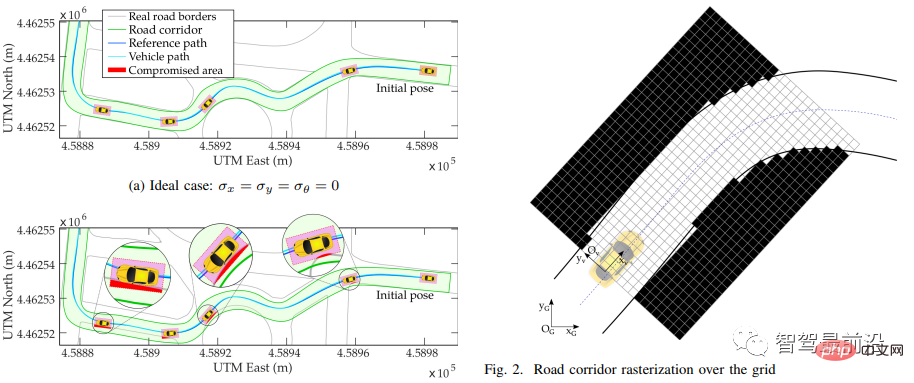
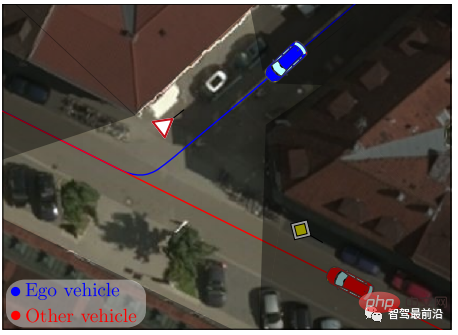
In den meisten Bewegungsplanungen wird die Positionierung als ausreichend genau angesehen. In tatsächlichen Szenarien ist die Positionierung jedoch aufgrund von Problemen wie Okklusion und Mehrwegestörungen oft ungenau. Wie in der Abbildung unten links im Artikel [6] dargestellt, führt der Positionierungsfehler zu Fehlern in der vom HD-Kartenmodul abgefragten Straßengrenze, sodass die Planungs- und Fahrzeugfahrrouten auf der Straßengrenze liegen.
Bild
Der Artikel geht davon aus, dass die Positionierungsunsicherheit eine Gaußsche Verteilung ist und das Positionierungsmodul den Erwartungswert und die Varianz der Wahrscheinlichkeitsverteilung berechnen kann. Das Papier wandelt das Fahrzeugkoordinatensystem in das UTM-Koordinatensystem um. Gemäß der Hochgeschwindigkeitsverteilung der Positionierung und der Koordinatentransformationsformel kann die Unsicherheit der Umgebung des Fahrzeugs unter dem Einfluss der Positionierung berechnet werden, wie in der Abbildung dargestellt Rechts oben gilt: Je dunkler die Farbe, desto größer die Unsicherheit. Die Berechnungsformel für die Unsicherheit wird hauptsächlich durch die folgende Formel ermittelt.
Es lässt sich feststellen, dass die Unsicherheit umso höher ist, je weiter sie vom ADC entfernt ist. Je weiter sich das Fahrzeug vorwärts bewegt, desto größer wird seine Unsicherheit. Die Pfadplanungsmethode verwendet die Lattice-Methode (quintische Polynomkurve), und während der Kostenberechnung werden zwei Elemente hinzugefügt. Eine davon ist eine harte Einschränkung: Die maximale Unsicherheit eines Punktes auf dem Planungspfad darf nicht größer als ein bestimmter Schwellenwert sein. Die zweite besteht darin, die Gewichtssumme der Unsicherheiten in der Kostenfunktion zu addieren.
2.3.2 Wahrnehmungsunsicherheit
Aufgrund von Sensorgeräuschen, Fahrzeugvibrationen, Fahrumgebung und unvollständigen Algorithmen sind die Wahrnehmungsergebnisse unsicher oder sogar falsch. Aufgrund der wahrgenommenen Unsicherheit werden die Ergebnisse der Bewegungsplanung unsicher sein. Eine einfache Verarbeitungsmethode besteht darin, einen Puffer hinzuzufügen. Eine grobe Verarbeitungsmethode verringert jedoch den möglichen Bereich der Bewegungsplanung und kann zu einer übermäßig aggressiven oder übermäßig konservativen Fahrstrategie führen.
Der Artikel [7] nimmt als Beispiel eine Parkanwendung, die mit Around View Monitoring (AVM) ausgestattet ist. Aufgrund des Wahrnehmungsfehlers führt die Pfadplanung dazu, dass an der tatsächlichen Überholposition geparkt wird, und es kann zu einer Kollision kommen, wie in gezeigt die linke Abbildung unten. Das Papier modelliert die wahrgenommene Unsicherheit als Gaußsche Verteilung. Je weiter der wahrgenommene Effekt vom ADC entfernt ist, desto höher ist die Unsicherheit, wie in der rechten Abbildung unten dargestellt.
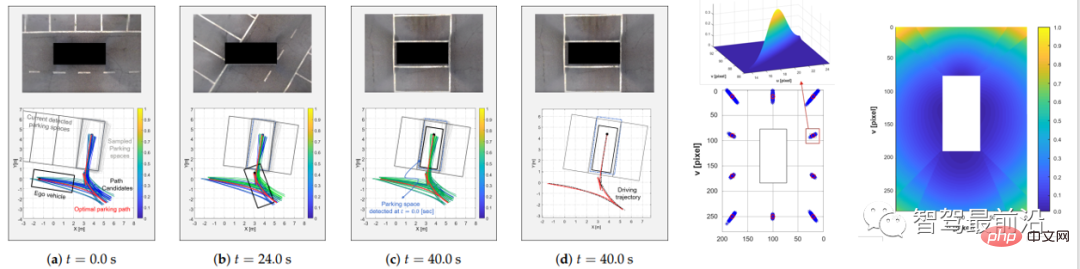
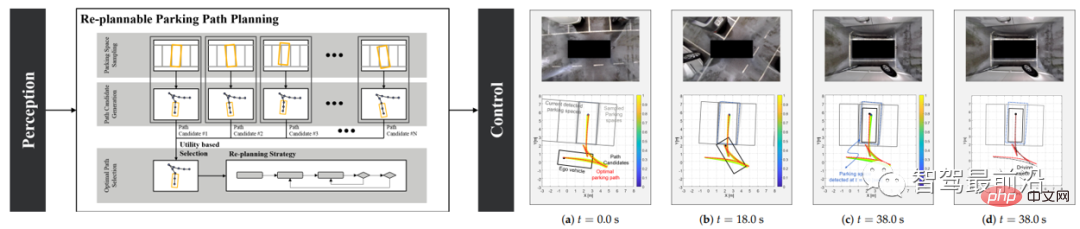
Die Gesamtarchitektur des Papiers ist im linken Bild unten dargestellt. Die Auswirkung der Verwendung dieses Algorithmus ist im rechten Bild unten dargestellt.
Parklückenabtastung: Abtastung der beiden dem ADC am nächsten gelegenen Eckpunkte, Behandlung der Abtastpunkte als normalverteilt und Berechnung des Parkpunkts in der Mitte der ADC-Hinterachse basierend auf den Abtasteckpunkten und der Länge der eingestellten Parklücke ;
Pfadkandidatengenerierung: Führen Sie die Pfadplanung für jeden Abtastpunkt durch, wobei das Zeitbereichsproblem in das Ferent-Koordinatensystem umgewandelt wird und SQP zur Lösung des nichtlinearen Problems verwendet wird.
Optimale Pfadauswahl: Verwenden Sie das Dienstprogramm Theorie zur Optimierung Pfadauswahl. Die Nutzenfunktion lautet: EU(s) = P(s) x Uideal(s) +(1-P(s)) x Ureal(s), wobei P(s) die Wahrscheinlichkeit ist, dass der Abtastpunkt dem Pfad entspricht. und Uideal ist der Pfad zur Abweichung des Nutzenfunktionswerts des Zielpunkts (im aktuellen Moment sensorisch erfasst, nicht durch Abtasten erhalten), Ureal ist der Nutzenfunktionswert auf dem Pfad zur aktuellen Position des ADC.
2.3.3 Vorhersageunsicherheit
Vorhersage ist ein wichtiges Glied, um autonomes Fahren auf hohem Niveau über L4 zu erreichen. Dennoch bleibt die Prognose für die gesamte Branche derzeit ein sehr schwieriges Problem. Daher ist die Genauigkeit der Vorhersage sehr gering und es ist sehr wichtig, die Bewegungsplanung unter der Unsicherheit der Vorhersageergebnisse durchzuführen.
Der Artikel [8] schlägt eine Planungsarchitektur vor, die auf der Gaußschen Verteilung basiert, um das Problem unsicherer Planungsverläufe zu lösen, die durch Unsicherheit bei Vorhersage und Kontrolle verursacht werden.
Kandidaten-Trajektoriengenerierung: generiert durch mehrstufige horizontale und vertikale Stichprobenziehung. Es kann als Aopllo-Gittermethode verstanden werden.
Generierung der vorhergesagten Trajektorie: Bei der Vorhersage (Planung) der Trajektorie eines bestimmten Fahrzeugs wird davon ausgegangen, dass andere Fahrzeuge mit konstanter Geschwindigkeit fahren, und ihr Status wird bestimmt. Anschließend wird die optimale Vorhersage durch Berechnen der Kosten der Kandidatentrajektorie ermittelt Flugbahn. Die Wahrscheinlichkeitsverteilung der vorhergesagten Flugbahn wird dann durch Kalman-Filterung berechnet, unter der Annahme, dass sie einer Normalverteilung folgt.
ADC-Trajektoriengenerierung: Zu diesem Zeitpunkt muss die Unsicherheit der Vorhersagen anderer Verkehrsteilnehmer berücksichtigt werden. Für jede Kandidatentrajektorie wird der Kontrollfehler durch den LQR-Algorithmus berechnet, und dann wird die Wahrscheinlichkeitsverteilung der Trajektorie durch Kalman-Filterung berechnet. Wenn die Cos-Berechnung zur Trajektorienbewertung durchgeführt wird, basiert die Kollisionserkennung auf der Wahrscheinlichkeitsverteilung der vorhergesagten und ADC plant Trajektorien, d. h. Kollisionen können nicht innerhalb einer Wahrscheinlichkeitsverteilung auftreten.
Der Autor glaubt, dass diese Methode dem Hinzufügen eines adaptiven Puffers zur Box entspricht, während ein herkömmlicher Puffer mit fester Größe zu konservativem oder aggressivem Fahrverhalten führt.
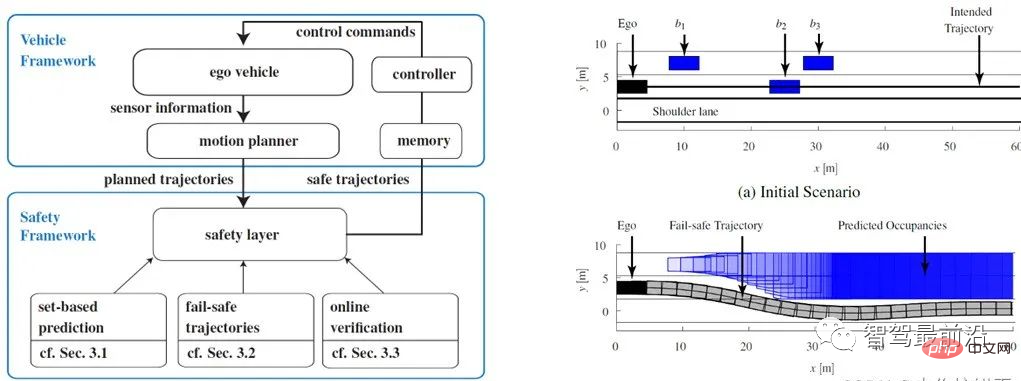
Das Papier [9] schlägt einen ausfallsicheren Mechanismus vor, der in das bestehende Bewegungsplanungs-Framework eingebettet werden kann, das in drei Teile unterteilt ist:
Set-basierte Vorhersage: basierend auf den formulierten Fahrstrategien und Fahrzeugen von Verkehrsteilnehmer: Das kinematische Modell ändert die ursprünglich einzelne vorhergesagte Flugbahn der Verkehrsteilnehmer in mehrere vorhergesagte Flugbahnen Trajektorie basierend auf der Optimierungstheorie;
Online-Überprüfung: Projizieren Sie den ADC auf die im zweiten Schritt generierte Trajektorie, um festzustellen, ob er mit der vorhergesagten Fahrzeugtrajektorie im ersten Schritt kollidiert.
Es fühlt sich an, als ob diese Methode in der Bewegungsplanung erneut angewendet wird. Da in diesem Artikel nicht beschrieben wird, ob die ausfallsichere Trajektorie die Entscheidungsergebnisse berücksichtigt, kann dies dazu führen, dass die sichere Trajektorie die Entscheidungsergebnisse nicht erfüllt eine Simulation und hat keine praktische Anwendung.
Aufgrund des begrenzten Erfassungsbereichs des Sensors selbst und der Unsicherheit der Erfassungsergebnisse wird dieser bei schlechter Beleuchtung oder schlechtem Wetter noch verstärkt. Unter städtischen Arbeitsbedingungen führt die Verdeckung von Gebäuden zu einer unvollständigen Wahrnehmung, wie in der folgenden Abbildung dargestellt. Darüber hinaus können große Fahrzeuge auch Wahrnehmungsverdeckungsprobleme verursachen, und die meisten Bewegungsplanungen werden mit vollständiger Wahrnehmung verarbeitet, was die Planungsergebnisse sehr unsicher macht.
 Das Papier [10] schlägt eine sichere Bewegungsplanung vor, die mit unvollständiger Wahrnehmung umgeht, sodass die geplante Trajektorie in den gefährlichsten Situationen unter der maximalen Bremskapazität des Fahrzeugs sicher und ohne Kollision anhalten kann. Es ist in zwei Situationen unterteilt: Die eine ist das Fahren auf einer geraden Straße unter Berücksichtigung der Wahrnehmungsunsicherheit und des Wahrnehmungsbereichs, die andere betrachtet die unvollständige Wahrnehmungssituation an städtischen Kreuzungen. Und es lässt sich leicht in andere Bewegungsplanungsarchitekturen einbetten. Der Autor führte eine Simulationsüberprüfung in der Trajektorienplanung basierend auf der zuvor vorgeschlagenen Optimierungsmethode durch (Abbildung (b) in der Rezension).
Das Papier [10] schlägt eine sichere Bewegungsplanung vor, die mit unvollständiger Wahrnehmung umgeht, sodass die geplante Trajektorie in den gefährlichsten Situationen unter der maximalen Bremskapazität des Fahrzeugs sicher und ohne Kollision anhalten kann. Es ist in zwei Situationen unterteilt: Die eine ist das Fahren auf einer geraden Straße unter Berücksichtigung der Wahrnehmungsunsicherheit und des Wahrnehmungsbereichs, die andere betrachtet die unvollständige Wahrnehmungssituation an städtischen Kreuzungen. Und es lässt sich leicht in andere Bewegungsplanungsarchitekturen einbetten. Der Autor führte eine Simulationsüberprüfung in der Trajektorienplanung basierend auf der zuvor vorgeschlagenen Optimierungsmethode durch (Abbildung (b) in der Rezension).
Der Autor hat mehrere Annahmen für seine Theorie aufgestellt:
Die Positions- und Geschwindigkeitsinformationen in Längsrichtung folgen der Gaußschen Verteilung.
Der effektive Wahrnehmungsbereich ist bekannt, und das Ergebnis der Wahrnehmung folgt der Gaußschen Verteilung enthalten Der Standort des Gebäudes, und es ist ein konvexes Polygon
Verwenden Sie das Intelligent Driver Model (IDM) zur Vorhersage der Fahrzeugbeschleunigung.
Da sich das Papier mit zwei Situationen befasst: geraden Straßen und Kreuzungen, ist eine Szenenerkennung erforderlich. Das Papier verwendet einen regelbasierten Ansatz für die Szenenerkennung.

Das Bild oben links: Die rot gepunktete Linie ist der Zeitpunkt, zu dem die beobachtete Umgebung erfasst wird, und die schwarz gepunktete Linie ist der Zeitpunkt für die Bewegungsplanung. Es ist ersichtlich, dass die von der Bewegungsplanung verwendeten Erfassungsinformationen vorher liegen die tp-Zeit. Da die Bewegungsplanung außerdem Kontinuität gewährleisten muss, muss die geplante Flugbahn innerhalb des Bewegungsplanungs-Berechnungszyklus tpin konsistent sein. Noch wichtiger ist, dass aufgrund der Verzögerung des Aktuators die Sicherheit der Flugbahn innerhalb der tsafe-Zeit gewährleistet sein muss. In der Arbeit ist tsafe=2tpin;
Oberes und mittleres Bild: Das Fahren auf einer geraden Straße wird in zwei Situationen unterteilt: kein Fahrzeug innerhalb der Erfassungsreichweite oder ein Fahrzeug innerhalb der Erfassungsreichweite: Zum einen befindet sich kein Fahrzeug innerhalb der Erfassungsreichweite Unter der Annahme, dass sich ein stehendes Fahrzeug außerhalb des Fahrerfassungsbereichs befindet, stellen Sie es als virtuelles stationäres Hindernis ein, und seine Gaußschen Verteilungseigenschaften können verwendet werden, um die Längsverschiebungs- und Geschwindigkeitsbeschränkungen zu berechnen, die die maximale Bremskapazität im tsafe-Moment erfüllen Wenn sich ein Fahrzeug innerhalb des Erfassungsbereichs befindet, kann unter Berücksichtigung der Unsicherheit der Erfassung die gefährlichste Situation, d Geschwindigkeitseinschränkungen beim Bremsen mit maximaler Bremsleistung innerhalb des tsafe-Moments;
Bild oben rechts: An der Kreuzung Berechnen Sie beim Fahren nach dem IDM-Modell, ob der ADC Vorfahrt haben muss und dies deutlich anzeigen muss Absicht, zuerst zu bestehen. Schließlich wurde auf zwei Arten von Beschränkungen für Geradeausfahrt umgestellt.
Single Agent betrachtet es als Einzelagentenproblem, das heißt, der ADC trifft Entscheidungen über die Umgebung, ohne die Auswirkungen der Verhaltensentscheidungen des ADC auf andere Verkehrsteilnehmer zu berücksichtigen, aber es ist offensichtlich ist, dass Bewegungsplanungsprobleme vereinfacht werden.
Verhaltensbasierte Entscheidungsfindung ist ein weiterer wichtiger Aspekt, der die Entwicklung des autonomen Fahrens beeinflusst. Mit zunehmendem Niveau des autonomen Fahrens wird die verhaltensbezogene Entscheidungsfindung immer wichtiger. Die Schwierigkeit bei Verhaltensentscheidungen besteht darin, die Intelligenz autonomer Fahrzeuge zu verkörpern und autonome Fahrzeuge in die Lage zu versetzen, hochdimensionale, komplexe Szenarien mit mehreren Einschränkungen wie menschliche Fahrer zu bewältigen oder sogar bessere Leistungen als menschliche Fahrer zu erbringen.
Die meisten aktuellen Methoden sind regelbasierte Methoden mit eingeschränkten Fähigkeiten. Im Hinblick auf die Verhaltensentscheidung auf der Grundlage der Regelmethode wird bei Off-Ramp-Bedingungen im Allgemeinen eine Abstandsschwelle vom Rampeneingang entworfen. Wenn der Abstand vom ADC zur Rampe innerhalb des Schwellenwerts liegt, beginnt der Spurwechsel auf die Spur ganz rechts.
Unter der Annahme, dass dieser Schwellenwert 2 km beträgt und der ADC 2,1 m vor der Rampenkreuzung auf der Mittelspur fährt und ein Auto mit niedriger Geschwindigkeit voraus ist, entscheidet sich die regelbasierte Verhaltensentscheidung im Allgemeinen dafür Wechseln Sie die Spur auf die linke Spur (links). Die Geschwindigkeitsbegrenzung auf der Spur ist hoch und das Überholen muss der linken Spur folgen. Aus Xiaopeng NGP und anderen geht hervor, dass die linke Spur Vorrang hat. Allerdings beträgt der Mindestabstand zur Rampeneinfahrt nach dem Spurwechsel weniger als 2 km. Zu diesem Zeitpunkt muss auf die Spur ganz rechts gewechselt werden, und es müssen zwei aufeinanderfolgende Spurwechsel durchgeführt werden, was nicht intelligent genug erscheint.
Ein weiteres Beispiel ist das Fahren auf der Spur ganz rechts 500 m vor der Rampe. Wenn die Straße vor Ihnen aufgrund einer Baustelle oder eines Unfalls nicht befahren werden kann, kann der Fahrer zu diesem Zeitpunkt nur übernehmen. Es zeigt sich, dass es aufgrund der Komplexität der realen Arbeitsbedingungen schwierig ist, mit einer regelbasierten Verhaltensentscheidungsmethode ein gutes Fahrerlebnis zu erreichen.
Die Verhaltensentscheidungsarbeit der Hong Kong University of Science and Technology zu OPMDP [11] weist im Vergleich zur regelbasierten Methode eine gewisse Leistungsverbesserung auf. Sie beschneidet das Verhalten von ADC und anderen Verkehrsteilnehmern und reduziert so den Zeitaufwand von OPMDP . Dabei wird jedoch berücksichtigt, dass andere Verkehrsteilnehmer das Verhalten des ADC usw. meiden. Es ist ersichtlich, dass es sich um ein Multiple-Agent-Problem handelt, mit dem man umgehen muss.
2.5 Multiple Agent
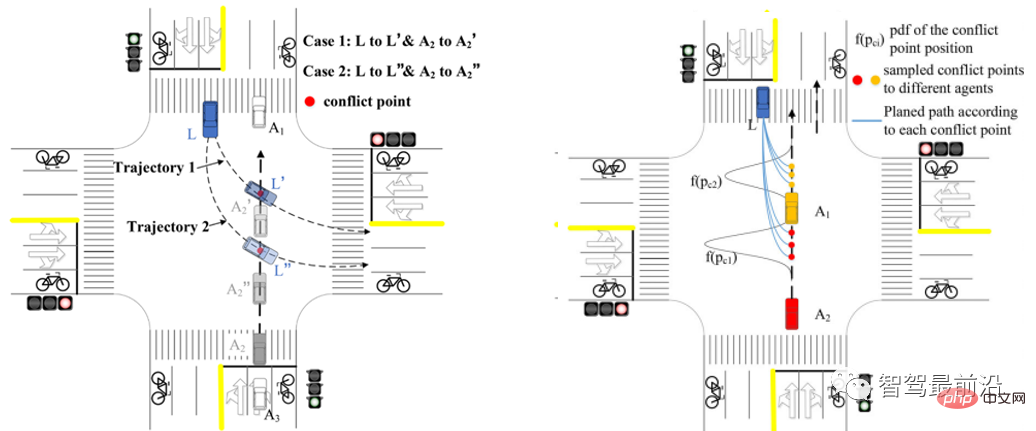
Beim oben genannten Single Agent wird davon ausgegangen, dass Verkehrsteilnehmer keine entsprechenden Entscheidungen über das Verhalten des ADC treffen. In Wirklichkeit wird jedoch dessen Verhalten beeinflusst, wenn er eine Entscheidung trifft Verhalten anderer Verkehrsteilnehmer, was die Glaubwürdigkeit der ursprünglichen Vorhersageergebnisse verringert, insbesondere einige einfache regelbasierte Vorhersagen, die nicht von den Bewegungsplanungsergebnissen abhängen oder die Ergebnisse der vorherigen Frame-Bewegungsplanung (Apollo) verwenden.
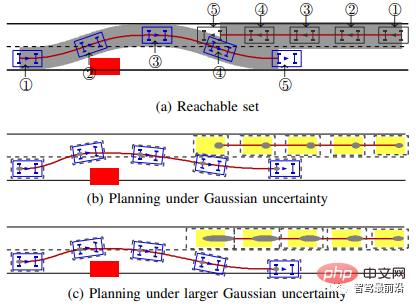
Wenn sich beispielsweise im linken Bild unten ADC L entlang der Flugbahn 1 bewegt, kann A2 langsamer werden, um dieser auszuweichen. Während sich ADC L entlang der Flugbahn 2 bewegt, kann A2 über den Schnittpunkt beschleunigen. Aber wenn ADC L entlang der Trajektorie 2 fährt, wird vorhergesagt, dass A2 über die Kreuzung beschleunigen könnte, aber A2 könnte die Absicht von ADC L missverstehen und langsamer werden, was dazu führt, dass die beiden Fahrzeuge blockieren. Daher ist es entscheidend, wie ADC die Absichten anderer Verkehrsteilnehmer versteht und wie andere Verkehrsfahrzeuge die Absichten von ADC verstehen [12].
Bei der Bewegungsplanung gibt es auch einige technische Probleme, die hauptsächlich die folgenden Aspekte umfassen.
Echtzeit: Das in der ersten Frage erwähnte Optimalitätsproblem kann aufgrund der Komplexität der Suchberechnungen im dreidimensionalen Raum auch garantiert werden die Anwendung gemeinsamer Raum-Zeit-Planung. Darüber hinaus stellen großräumige Einschränkungen und Nichtlinearität im Optimierungsalgorithmus auch Echtzeitherausforderungen dar.
Vollständigkeit: Algorithmen wie Interpolation und Lattice sind probabilistisch vollständig. Insbesondere in komplexen Umgebungen mit mehreren Hindernissen ist es schwierig, mit begrenzter Abtastung eine kollisionsfreie Flugbahn zu erhalten. Aufgrund der numerischen Lösung kann die Optimierungsmethode keine Vollständigkeit erreichen, und der häufig verwendete OSQP-Löser liefert möglicherweise sogar eine falsche Lösung.
Schwer zu quantifizieren: Die meisten Bewertungsindikatoren in der Bewegungsplanung sind subjektiv, wie z. B. Komfort und Passierbarkeit usw., die schwer quantitativ zu bewerten sind. Verschiedene Ingenieure erhalten durch Parameteranpassung unterschiedliche Körperempfindungen, die sich auch von den subjektiven Gefühlen der Passagiere unterscheiden. Daher werden Methoden des maschinellen Lernens vorgeschlagen, um Parameter oder Spurwechselstrategien in der Bewegungsplanung zu erlernen.
Als Reaktion auf die oben genannten Probleme und Herausforderungen erforschen und schlagen auch Unternehmen der Branche aktiv einige Lösungen vor, von denen einige unten aufgeführt sind.
Qingzhou Zhihang nutzt die gemeinsame Raum-Zeit-Planung, um das Optimalitätsproblem zu lösen, die Planungsleistung zu verbessern und entwickelt einen selbst entwickelten nichtlinearen Planer für eine effiziente Lösung [2].
Im TuSimple-Framework der neuen Generation stellt das Wahrnehmungsmodul bei der Bereitstellung von Informationen wie Hindernisort und -geschwindigkeit auch Unsicherheits- oder Wahrscheinlichkeitsinformationen bereit, um sicherzustellen, dass bei der Entscheidungsplanung im Voraus sichere und komfortable Entscheidungen getroffen werden können [13].
Tesla nutzt Planer für andere Fahrzeuge für Verkehrsteilnehmer. Bei der Interaktion mit anderen Fahrzeugen sollte die Planung jedoch nicht nur für den ADC erfolgen, sondern für alle Verkehrsteilnehmer gemeinsam geplant werden, um den Verkehrsfluss der Gesamtszene zu optimieren. Dazu wird der Autopilot-Planer für jedes beteiligte Objekt in der Szene ausgeführt. Darüber hinaus werden für Parkszenarien der A-Suchalgorithmus und die Kombinationsstrategie für neuronale Netze verwendet, was die Knotenerkundung des A-Algorithmus erheblich reduziert [15].
Xpeng und Tesla haben das Problem fehlender Fahrspurlinien und Änderungen in der Straßentopologie optimiert [14].
Waymo schlug ChauffeurNet vor, um die Entscheidungsleistung zu verbessern [16], und Apollo schlug eine eigene Reinforcement-Learning-Architektur [17] basierend auf ChauffeurNet vor.
Das obige ist der detaillierte Inhalt vonEin Artikel über die Probleme und Herausforderungen bei der Entscheidungsplanung für autonomes Fahren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Wie viel entspricht Snapdragon 8gen2 Apple?
Wie viel entspricht Snapdragon 8gen2 Apple?
 So beheben Sie den Anwendungsfehler WerFault.exe
So beheben Sie den Anwendungsfehler WerFault.exe
 absoluteslayout
absoluteslayout
 Mongodb und MySQL sind einfach zu verwenden und empfehlenswert
Mongodb und MySQL sind einfach zu verwenden und empfehlenswert
 Verwendung des Zahlenformats
Verwendung des Zahlenformats
 Konvertierung von RGB in Hexadezimal
Konvertierung von RGB in Hexadezimal
 So erstellen Sie Diagramme und Datenanalysediagramme in PPT
So erstellen Sie Diagramme und Datenanalysediagramme in PPT
 Welche sind die am häufigsten verwendeten Drittanbieter-Bibliotheken in PHP?
Welche sind die am häufigsten verwendeten Drittanbieter-Bibliotheken in PHP?








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



