


Originaltitel: DenserRadar: Ein 4D-Millimeterwellen-Radar-Punktwolkendetektor basierend auf dichten LiDAR-Punktwolken
Papierlink: https://arxiv.org/pdf/2405.05131
Autorenzugehörigkeit: Tsinghua University

4D-Millimeterwellenradar (mmWave) hat sich mit seiner Robustheit in extremen Umgebungen, seinem großen Erfassungsbereich und der Fähigkeit, Geschwindigkeit und Höhe zu messen, als nützlich in autonomen Fahrsystemen in Grenzsituationen (Kurven-) erwiesen. Fall) hat ein erhebliches Potenzial zur Verbesserung der Wahrnehmung. Die inhärente Spärlichkeit und das Rauschen von 4D-Millimeterwellenradar-Punktwolken schränken jedoch ihre weitere Entwicklung und praktische Anwendung ein. In diesem Artikel wird ein neuartiger 4D-Millimeterwellen-Radarpunktwolkendetektor vorgestellt, der hochauflösende dichte Radarpunktwolken nutzt. Unsere Methode erstellt aus zusammengefügten LiDAR-Punktwolken eine dichte 3D-Bodenwahrheit über den besetzten Raum und verwendet ein speziell entwickeltes Netzwerk namens DenserRadar. Die vorgeschlagene Methode übertrifft bestehende wahrscheinlichkeitsbasierte und lernbasierte Millimeterwellenradar-Punktwolkendetektoren hinsichtlich Punktwolkendichte und Genauigkeit und erzielt bessere Ergebnisse im K-Radar-Datensatz.
Bei dieser Arbeit handelt es sich um den ersten 4D-Millimeterwellenradar-Punktwolkendetektor, der durch dichte 3D-Datenraum-Bodenwahrheit überwacht wird, die durch Zusammenfügen von Multi-Frame-LiDAR-Punktwolken erzeugt wird, wodurch der erfasste Millimeter verdichtet wird Wellenradar-Punktwolke.
Dieses Papier schlägt einen innovativen Prozess zur Generierung der 3D-Bodenwahrheit im dichten Schnee-Datenraum sowie das Zusammenfügen dichter LiDAR-Punktwolken des K-Radar-Datensatzes vor. Diese Punktwolken liefern umfassende Szenen-Bodenwahrheiten und werden nach der Veröffentlichung verfügbar sein weitere Forschung.
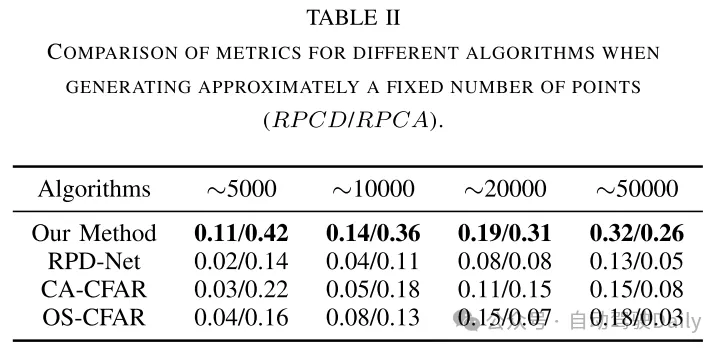
Aufgrund des speziellen Designs des DenserRadar-Netzwerks ist der Algorithmus in diesem Artikel den bestehenden CFAR-Typ- und lernbasierten Millimeterwellenradar-Punktwolkenerkennungsmethoden hinsichtlich der Dichte und Genauigkeit von Punktwolken überlegen.
Autonome Fahrtechnologie zielt darauf ab, ein sicheres, bequemes und komfortables Transporterlebnis zu bieten, und ihre Entwicklungsgeschwindigkeit ist beeindruckend. Um autonomes Fahren auf hohem Niveau zu erreichen, ist die Fähigkeit, komplexe Umgebungen wahrzunehmen und zu positionieren, unabdingbar. Daher stoßen die Sensoren autonomer Fahrzeuge, darunter Kameras, Lidar (LiDAR) und Millimeterwellenradar, sowie die zugehörigen Algorithmen auf immer größeres Forschungsinteresse.
Aufgrund seiner Vorteile wie kompakter Größe, hoher Kosteneffizienz, Allwetteranpassungsfähigkeit, Geschwindigkeitsmessfähigkeit und großem Erfassungsbereich [1] wird Millimeterwellenradar (mmWave) häufig im Bereich des autonomen Fahrens eingesetzt. Jüngste Fortschritte in der MIMO-Antennentechnologie (Multiple-Input-Multiple-Output) haben die Höhenauflösung weiter verbessert und die Entstehung von 4D-Millimeterwellenradar ermöglicht. Daher wird 4D-Millimeterwellenradar zunehmend als eine entscheidende Verbesserung der Wahrnehmungs- und Positionierungsfähigkeiten beim autonomen Fahren angesehen, insbesondere in anspruchsvollen Randszenen wie Regen, Schnee und Nebel. Wie der Name schon sagt, kann das 4D-Millimeterwellenradar vier Dimensionen von Zielinformationen messen: Entfernung, Azimut, Höhe und Doppler-Geschwindigkeit und bietet so eine umfassende Sensorlösung.
Allerdings hinkt die Qualität von 4D-Millimeterwellenradar-Punktwolken deutlich hinter Lidar-Punktwolken hinterher. Erstens haben 4D-Millimeterwellenradar-Punktwolken Probleme mit der geringen Auflösung, insbesondere bei der Winkelmessung. Diese Einschränkung ist hauptsächlich auf die Antennenkonfiguration und die Ankunftsrichtungsschätzung (DOA) des mmWave-Radars zurückzuführen [2]. Zweitens sind 4D-Millimeterwellenradar-Punktwolken viel spärlicher als Lidar-Punktwolken. Drittens enthalten 4D-Millimeterwellenradar-Punktwolken aufgrund von Mehrwegeeffekten, Signalinterferenzen und Bodenreflexionen häufig eine große Anzahl von Störpunkten. All diese Mängel behindern den Einsatz von 4D-Millimeterwellenradar beim autonomen Fahren.
Die Qualität von 4D-Millimeterwellenradar-Punktwolken wird nicht nur durch die Hardware, sondern auch durch Signalverarbeitungsalgorithmen begrenzt [3]. Insbesondere die Erkennung realer Ziele anhand von Rohradargrammen oder Tensoren zur Generierung von Punktwolken kann die Qualität erheblich beeinträchtigen. Traditionell werden der False Alarm Rate (CFAR)-Detektor und seine Varianten [4], [5] häufig zur Erkennung von Millimeterwellenradar-Punktwolken eingesetzt. Als wahrscheinlichkeitsbasierter Algorithmus können CFAR-Detektoren jedoch bei der Erkennung von Objekten unterschiedlicher Größe auf Probleme stoßen, da diese Objekte nicht unabhängig und identisch verteilt sind [6], was in autonomen Fahrszenarien häufig vorkommt.
Um die mit 4D-Millimeterwellenradar verbundenen Qualitätsprobleme bei Punktwolken anzugehen, schlägt dieses Papier einen lernbasierten 4D-Millimeterwellenradar-Punktwolkendetektor vor, der durch dichte Bodenwahrheitsinformationen überwacht wird, die aus Lidar-Punktwolken generiert werden. Zunächst werden in dieser Arbeit mehrere Rahmen vorverarbeiteter LiDAR-Punktwolken zusammengefügt, um eine dichte 3D-Belegungsgrundwahrheit zu generieren. In diesem Artikel wird dann das DenserRadar-Netzwerk vorgestellt, das die Merkmale des ursprünglichen 4D-Millimeterwellenradar-Tensors extrahiert und eine dichtere und genauere 4D-Millimeterwellenradar-Punktwolke erzeugt. Das Netzwerk nutzt eine gewichtete Hybridverlustfunktion zusammen mit anderen neuartigen Designelementen, um Merkmale mit mehreren Auflösungen zu erfassen und Punktwolken mit besserer Auflösung als herkömmliche Techniken zu erzeugen. Vergleichende Experimente mit dem K-Radar-Datensatz [7] belegen die Wirksamkeit dieser Methode.
Der Algorithmus dieses Artikels ist in Abbildung 1 dargestellt. In diesem Artikel wird zunächst ein Verfahren zur Generierung der Bodenwahrheit entworfen, um die Bodenwahrheit des dichten 3D-besetzten Raums als Überwachungsinformationen durch Zusammenfügen von Lidar-Punktwolkendaten mit mehreren Frames zu erhalten. Anschließend wird das DenserRadar-Netzwerk eingerichtet, dessen Aufgabe darin besteht, Daten aus der ursprünglichen 4D-Millimeterwelle zu generieren Erkennung von Millimeterwellen-Radarpunktwolken in Radartensordaten.

Abbildung 1. Übersicht über den gesamten Algorithmus.

Abbildung 2. Flussdiagramm zur Wahrheitswertgenerierung.

Abbildung 4. Qualitativer Punktwolkenvergleich zwischen dem DenserRadar-Algorithmus und dem CA-CFAR-Algorithmus in diesem Artikel, mit Bildern und echten Punktwolken im dichten 3D-besetzten Raum als Referenz. Jeder Pfeil im Diagramm repräsentiert eine Länge von 10 Metern.


Dieses Papier stellt DenserRadar vor, ein neuartiges 4D-Millimeterwellenradar-Punktwolkenerkennungsnetzwerk, und einen innovativen Prozess zur Generierung dichter Bodenwahrheit. Experimentelle Ergebnisse und Ablationsstudien belegen die Wirksamkeit unserer Netzwerkarchitektur und Methodik zur Generierung der Grundwahrheit. Diese Forschung hat das Potenzial, die Wahrnehmungs- und Lokalisierungsfähigkeiten autonomer Fahrsysteme zu verbessern, insbesondere in anspruchsvollen Edge-Case-Szenarien.
Das obige ist der detaillierte Inhalt vonDenserRadar: 4D-Millimeterwellenradar-Punktwolkendetektor basierend auf einer dichten LiDAR-Punktwolke. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 minidump.dmp
minidump.dmp
 Was tun, wenn die CHM-Datei nicht geöffnet werden kann?
Was tun, wenn die CHM-Datei nicht geöffnet werden kann?
 Webseite maximieren
Webseite maximieren
 So erstellen Sie einen Enzyklopädieeintrag
So erstellen Sie einen Enzyklopädieeintrag
 So verwenden Sie den Fragezeichenausdruck in der C-Sprache
So verwenden Sie den Fragezeichenausdruck in der C-Sprache
 Der Unterschied zwischen MS Office und WPS Office
Der Unterschied zwischen MS Office und WPS Office
 Was lohnt sich mehr zu lernen, C-Sprache oder Python?
Was lohnt sich mehr zu lernen, C-Sprache oder Python?
 cmd-Befehl zum Bereinigen von Datenmüll auf Laufwerk C
cmd-Befehl zum Bereinigen von Datenmüll auf Laufwerk C








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



